The robots are coming to clean up our nuclear sites
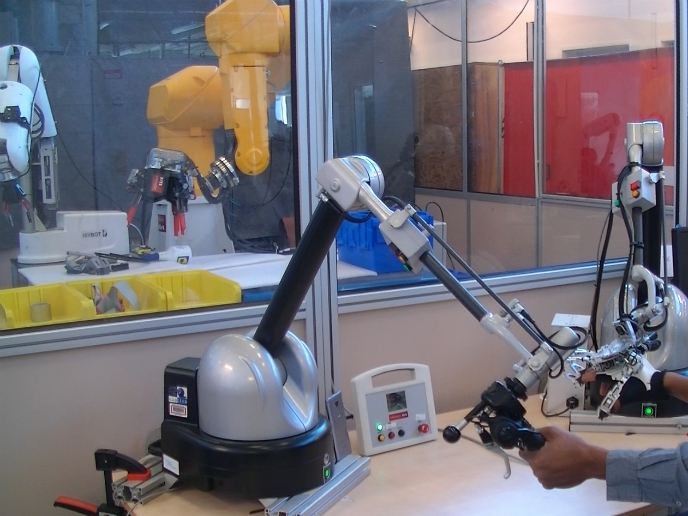
The United Kingdom contains 4.9 million tonnes of legacy nuclear waste, partly by-products of weapons production during the Cold War. “Cleaning up the United Kingdom’s legacy waste is the biggest environmental remediation project across Europe; it is expected to take over 100 years and cost more than EUR 200 billion. At least 20 % of decommissioning work must be conducted by robots,” notes Professor Rustam Stolkin, who has been coordinating the EU-funded project RoMaNS. The project demonstrated advanced robotics technologies that can safely and cost-effectively carry out important tasks in dangerous environments. The sophisticated systems progressed beyond the state of the art in robotic vision, motion-planning, control and human-robot interfaces. It also demonstrated, for the first time, how these technologies can be applied to the societally important problems posed by nuclear environments. Why current technology is ineffective Large numbers of waste containers found in legacy nuclear sites, some of them 60 years old, must now be cut open, investigated, and their contents sorted. Given that they contain mixed contamination levels, waste must be sorted and segregated, so that low-level contaminated waste is placed in low-level storage containers, rather than occupying very expensive and high-level storage containers. There has been surprisingly little use of robots in the nuclear industry, aside from a few cases deploying rudimentary remote-control systems. “Typically, robot movement in hazardous industrial environments is controlled by human operators via joysticks. However, this approach is prohibitively slow for processing the vast quantity of contaminated material,” notes Prof. Stolkin. Nuclear robots meet artificial intelligence Artificial intelligence in robotic systems could transform how workers interact with nuclear environments. Artificially intelligence-controlled robots can rapidly perform tasks, such as grasping objects, which are extremely difficult using conventional joystick teleoperation. In addition to developing autonomous capabilities, in which the robot automatically grasps and manipulates objects, the RoMaNS team developed new advanced technologies for teleoperation by human operators. This included a radiation-resilient robot ‘slave’ arm controlled by a robotic glove, or haptic exoskeleton, worn by the operator. The remote slave robot mimics the motions of the human’s hand and fingers. Meanwhile, the haptic exoskeleton allows the human to feel the forces being experienced by the slave robot as its fingers close around objects. RoMaNS worked towards a shared control concept in which humans and artificial intelligence collaborate to control a remote robot. “Shared control brings together autonomy and teleoperation. For example, human operators can control the motion of a robot arm towards an object, while artificial intelligence automatically orients the gripper in the right direction to achieve a good grasp with the object,” outlines Prof. Stolkin. Shared control brings together the haptic exoskeletons of the teleoperation research, with the AI algorithms developed in the autonomous robotics research. The haptic exoskeleton can provide force cues to the human, nudge them in directions that the AI algorithms believe will result in e.g. stable grasps, or avoid collisions with obstacles. Unlike conventional robots that perform repetitive pre-programmed motions in the manufacturing industry, RoMaNS technology can handle a wide variety of objects and materials, in unstructured and cluttered scenes, for which the robot may have no prior knowledge. The system needs to constantly plan its actions in real-time by combining information from cameras and other sensors. “This is the first time worldwide that an autonomous, artificially intelligence-controlled robot has been deployed in a radioactive environment. The RoMaNS achievement shows how advanced robotics can leave the realms of the laboratory and be deployed in an extremely risk-averse and safety-critical industry,” concludes Stolkin.
Keywords
RoMaNS, robot, artificial intelligence, autonomous, nuclear site, nuclear waste, shared control, robotic glove, radiation, sense of agency