Roboty posprzątają obiekty jądrowe
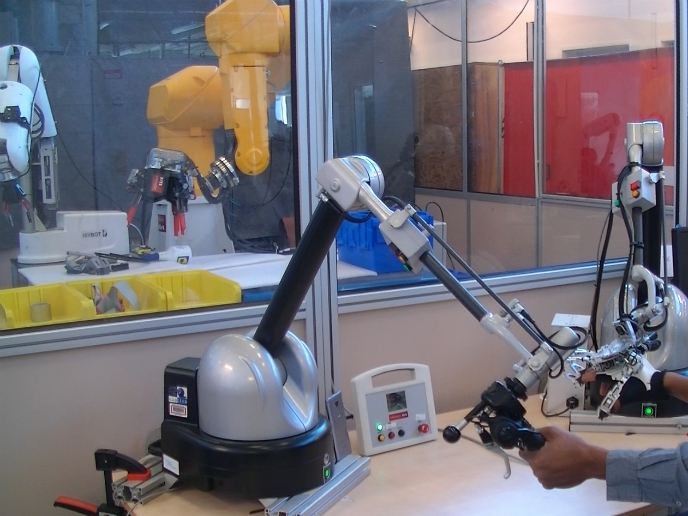
W Zjednoczonym Królestwie zalega 4,9 mln ton odpadów promieniotwórczych, częściowo będących pozostałością po produkcji broni w czasie zimnej wojny. „Oczyszczanie brytyjskich odpadów jest największym projektem rekultywacji środowiska w Europie. Ma potrwać ponad 100 lat i kosztować ponad 200 mld EUR. Co najmniej 20 % prac likwidacyjnych musi być prowadzonych przez roboty”, mówi profesor Rustam Stolkin, który koordynował finansowany przez UE projekt RoMaNS. W ramach projektu zademonstrowano zaawansowane technologie robotyczne, które umożliwiają bezpieczne i ekonomiczne wykonywanie ważnych czynności w niebezpiecznych środowiskach. W złożonych systemach wykorzystano najnowsze zdobycze techniki w zakresie wizji robotycznej, planowania ruchu, sterowania i interfejsów człowiek–robot. Po raz pierwszy pokazano również, w jaki sposób technologie te można zastosować w odniesieniu do ważnych problemów społecznych, jakie stwarza środowisko jądrowe. Dlaczego obecna technologia jest nieskuteczna Wiele pojemników na odpady znajdujące się w starszych obiektach jądrowych, z których część ma 60 lat, trzeba teraz pociąć, zbadać i posortować ich zawartość. Biorąc pod uwagę, że zawierają one zanieczyszczenia o różnym poziomie radioaktywności, odpady muszą zostać posegregowane, tak aby te mniej skażone nie zajmowały miejsca w bardzo drogich pojemnikach na wysokoaktywne odpady. W przemyśle jądrowym wykorzystuje się zaskakująco mało robotów, poza kilkoma przypadkami dotyczącymi rozmieszczania podstawowych systemów zdalnego sterowania. „Zazwyczaj ruch robota w niebezpiecznych środowiskach przemysłowych jest kontrolowany przez operatorów za pomocą joysticków. Jednak ta metoda jest zbyt powolna, by nadawać się do przetwarzania dużych ilości skażonego materiału”, zauważa prof. Stolkin. Spotkanie robotów jądrowych ze sztuczną inteligencją Sztuczna inteligencja w systemach robotycznych może zmienić sposób, w jaki pracownicy oddziałują ze środowiskiem jądrowym. Roboty sterowane przez sztuczną inteligencję mogą szybko wykonywać zadania, takie jak chwytanie przedmiotów, które są niezwykle trudne przy użyciu konwencjonalnego zdalnego sterowania za pomocą joysticka. Oprócz rozwijania autonomicznych funkcji, dzięki którym robot automatycznie chwyta przedmioty i manipuluje nimi, zespół RoMaNS opracował nowe zaawansowane technologie zdalnego sterowania przez operatorów. Przykładem jest tu odporne na promieniowanie ramię robota, sterowane za pomocą rękawicy robotycznej (haptycznego egzoszkieletu) noszonej przez operatora. Zdalny robot naśladuje ruchy dłoni i palców człowieka. Z kolei haptyczny egzoszkielet umożliwia operatorowi odczuwanie sił, których doświadcza robot, gdy jego palce zaciskają się na przedmiocie. Uczestnicy projektu RoMaNS pracowali nad koncepcją współdzielonego sterowania, polegającej na współpracy ludzi i sztucznej inteligencji w celu kontrolowania pracy zdalnego robota. „Współdzielone sterowanie łączy autonomiczność i teleoperację. Na przykład, operatorzy mogą kontrolować ruch ramienia robota w kierunku przedmiotu, podczas gdy system sztucznej inteligencji automatycznie ustawia chwytak we właściwym kierunku, aby skutecznie chwycić przedmiot”, tłumaczy prof. Stolkin. Współdzielone sterowanie łączy haptyczne egzoszkielety stosowane w badaniach nad teleoperacją z algorytmami sztucznej inteligencji opracowanymi w ramach badań nad autonomicznymi robotami. Haptyczny egzoszkielet może dostarczać człowiekowi wskazówek przekazywanych za pomocą siły oddziałującej na jego dłoń, popychając ją w kierunku, który według algorytmów sztucznej inteligencji umożliwia stabilne chwycenie przedmiotu lub uniknięcie zderzenia z przeszkodami. W odróżnieniu od konwencjonalnych robotów, które wykonują powtarzalne zaprogramowane ruchy w przemyśle wytwórczym, technologia RoMaNS pozwala na maniupulowanie wieloma różnymi obiektami i materiałami, w nieuporządkowanych miejscach, o których robot może nie mieć żadnych wcześniejszych informacji. System musi stale planować swoje działania w czasie rzeczywistym poprzez łączenie informacji z kamer i innych czujników. „Po raz pierwszy autonomiczny, sterowany przy pomocy sztucznej inteligencji robot został umieszczony w środowisku radioaktywnym. Osiągnięcia RoMaNS pokazują, że zaawansowana robotyka może opuścić sferę laboratorium i zostać wdrożona w sektorze charakteryzującym się dużym ryzykiem i krytycznym znaczeniem dla bezpieczeństwa”, podsumowuje Stolkin.
Słowa kluczowe
RoMaNS, robot, sztuczna inteligencja, autonomia, obiekt jądrowy, odpady jądrowe, wspólna kontrola, rękawice robotyczne, promieniowanie, poczucie sprawczości