Mining robots designed for selective extraction

Rare minerals are essential to many critical industries, including energy, electronics and defence. Most such minerals are imported, as European deposits tend to be small and in areas that are difficult to access. The EU-funded project ROBOMINERS(opens in new window) investigated ways to develop cost-effective and environmentally friendly methods for the extraction of crucial minerals.
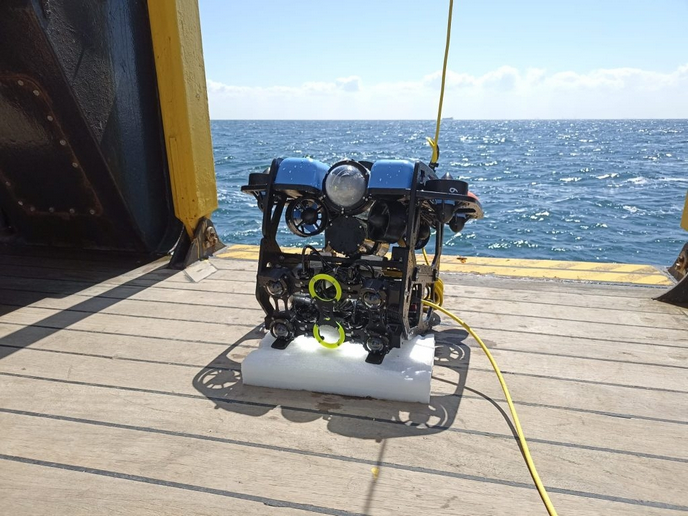
Mining robot prototype
“ROBOMINERS set out to develop a robust and versatile modular robotic prototype(opens in new window) capable of moving in difficult environments, including underwater. Inspired by biology, the team used the movement patterns of insects, worms and fish to design propulsive strategies for the robot. They also designed a locomotive technique based on Archimedes’ screw(opens in new window), which proved viable in a number of test environments. Locomotion is not the robot’s only bio-inspired feature. Based on the concept of whiskers, the prototype has sensors attached that help to provide 3D modelling of the area being mined. Spectrometers, mineralogical sensors and geophysical sensors attached to the robot allow it to identify desired minerals for extraction. The input from these sensors enhanced geological modelling, and the information obtained can be integrated with prior knowledge from established prospection methods. The project team worked on the development of the prototype to attain a technology readiness level of 4 or 5. Component testing was first conducted in the laboratory as well as in simulated settings, and the project made great strides in robotic design and selective mining. Intensive field tests were then carried out to check the system in two real mine environments. While research is not yet market-ready, the vision of ROBOMINERS is likely to be a game changer in the mining industry. Project manager Claudio Rossi states: “We envision a colony of robotic miners working underground, similar to a small ant colony. This approach enhances the resilience and productivity of the mining system, as the swarm-like behaviour enables coordinated and collaborative operations among robots with different functions.”
Eco-friendly mining solutions
Public opinion regarding mining has long been negative. This is understandable, given the ecological damage associated with the industry and the highly visible destruction evident in open-faced mines. ROBOMINERS offers solutions that can change that. Because the project-designed robot is meant to operate underground, only a small opening is necessary, eliminating the unsightly evidence presented by an open mine. Furthermore, because the mining robot can operate in water, there is no need to pump out liquid from flooded mines, which can be costly and introduce environmental damage. When operating underwater, the robot would pump mineral-rich slurry to the surface for processing. Once the desired ores are removed, the remaining slurry can be returned to the mined-out area for backfill – again minimising the environmental damage. Environmental concerns were forefront in the project. According to Rossi: “The entire concept of the project addresses environmental concerns through its focus on low-impact mining. The emphasis on selective and precision mining is meant to reduce both waste and the need for high-impact surface infrastructure.” The work of ROBOMINERS leverages modern technology in the best of ways. Not only will the autonomous, AI-driven robots provide the raw materials needed for critical industries, but teams of mining robots will also meet those needs in ways that minimise impact on the natural environment.