

Underwater robots now come with decision-making software
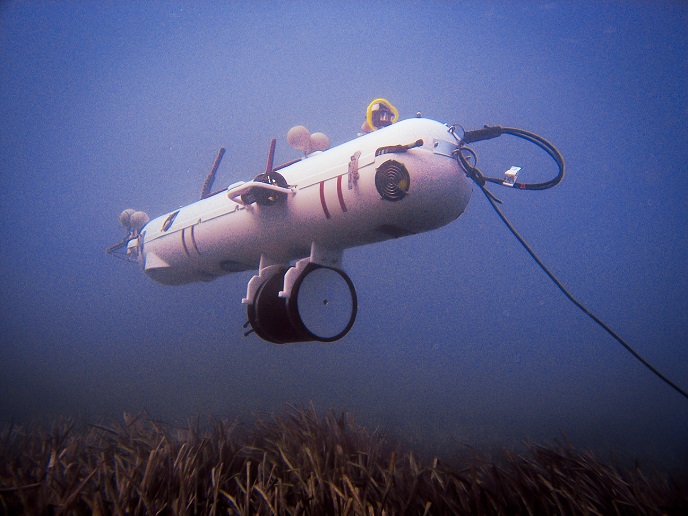
Archaeological exploration, scientific investigation, and ocean-floor land surveys for industrial and governmental development that includes laying pipelines or bridge construction are only a few of the reasons to explore underwater environments. With the support of the Marie Skłodowska-Curie programme, the TIC-AUV project set out to make the AUVs used in exploration(opens in new window) much smarter and able to stay on the job longer.
Addressing current limitations
Most AUVs are currently used for pre-programmed surveys requiring little or no ‘cognition’. According to principal investigator and grant recipient Francesco Maurelli, “The work performed in this project helped to make AUVs better able to understand the environment, make decisions and cope with unexpected events and faults to unlock their potential for the blue economy.” To accomplish his goals, Maurelli relied on his software development expertise to create information processing algorithms. These algorithms can help extract and analyse relevant information about the environment from AUV sensors.
Advanced utilities exploit environmental and robot data
Industrial robots have been around for decades, performing automated and repetitive tasks from a fixed location. As robots have moved out of the factory and into complex, unstructured and changing environments, their utility relies on the ability to process information about those environments and make decisions much as a human would. A self-propelled autonomous system must be able to build and update a rich representation of the changing operational environment. This includes its own location and orientation within it (localisation) and the interrelationships among objects, a feature called (semantic mapping)(opens in new window). As Maurelli explains, “The semantic world representation relies on two important aspects: the sensor processing aspect to analyse the data collected and identify important concepts, and the world-representation modelling to define which are the concepts of relevance for the specific domain and their relation.” Similarly, using sensors providing information about both the environment and the robot itself, the localisation algorithms estimate AUV orientation as well as position based on probabilities of proximity to objects in the world map. Maurelli’s sensor processing codes make possible the ultimate goals of the project, enabling smarter AUVs with longer dive durations through capabilities to respond to unforeseen events and faults. Active decision-making relies on optimising actions for a given task based on an accurate semantic map and AUV localisation. Fault management helps robots detect a fault and take appropriate action to address it, crucial for long-term autonomy. Code developed to manage failure of the propulsion system or thruster can be extended to a wide range of possible failures with an updated semantic map.
Broader implications
Putting it all in context, Maurelli says, “I was taught to never give up – to focus on your goals and do your best to achieve them. Somehow, I am pushing the robots with which I work in the same spirit – if there is a fault, find a way to address it so you can accomplish your mission.” Although TIC-AUV was conceived to enhance underwater robotics generally, on a larger scale Maurelli envisions smarter AUVs supporting the many facets of the UN 2030 Agenda for Sustainable Development(opens in new window) through sustainable exploration and exploitation of the seas and oceans.



