LUVMI, an autonomous rover for water detection on the Moon
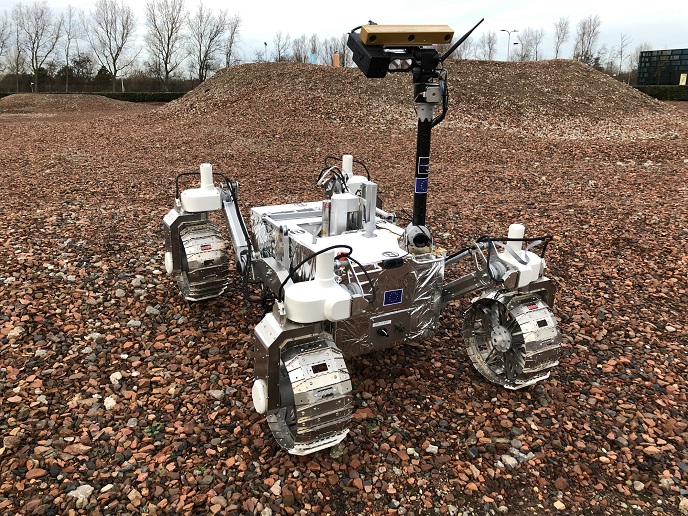
Temperatures on the Moon are extreme, ranging from boiling hot to bitterly cold depending on the Sun’s location. In permanently shadowed regions, temperatures may reach -230 degrees Celsius. Evidence now shows that shadowy craters at the Moon's poles may hide substantial reserves of ice – a precious resource in Space. In light of this, the EU-funded project LUVMI developed a prototype lightweight rover – together with a compact payload – that can be sent to the Moon to search for water, minerals and other vital resources. Water: Key to Space economy Fuel, energy and water would be a few primary resources that early space farers would trade as they would currency. “Water is the gold of Space and can be seen as the first step in building a Space economy,” notes Dr Jeremi Gancet, who has been leading LUVMI. Everything else would be secondary – human missions could harvest ice and turn it into fuel or oxidiser for spacecraft or use it as drinking water. “LUVMI’s rover qualities and dimensions have hit a sweet spot for future Moon exploration,” adds Dr Gancet. As he further explains, current and past robotic missions to the Moon have been relying on much larger robotic platforms – typically five to ten times heavier than LUVMI’s platform. In contrast, other missions involved much smaller platforms that would not necessarily provide any meaningful scientific results. Therefore, the volume and weight of the LUVMI setup – which is about 40 kg – make it a perfect match for future Moon exploration missions undertaken by the European Space Agency and other institutional organisations, or by private companies. Tailoring design for future missions Researchers developed a small-sized four-wheel electric rover equipped with drilling equipment and a mass spectrometer to detect water and other chemicals on the Moon’s surface. A novel light-field camera providing 3D data on the best places to extract water was also tested. A key innovation that simplifies sample transport is the compact integration of the volatile analyser and the volatile sampler. “Unlike most of other planetary missions, we will not ‘extract’ samples, but rather will immerse the instrument into the regolith and detect volatiles on site,” explains Dr Gancet. The sampling instrument can drill to a depth of 20 cm. LUVMI’s rover mobility is organised around the concept of a moving wheel framework and an adjustable suspension that enables change in the height of the chassis. Raising the chassis can increase the clearance and facilitate navigation in cluttered regions. Furthermore, the adjustable suspension can overcome obstacles of more than 30 cm in height. This innovation enables the rover to carefully handle science instruments and also adapt to the terrain. What’s more, the rover is designed to move autonomously, with limited guidance. This capability, which only larger rovers have, enables the LUVMI rover to safely navigate Moon’s regions when communication with Earth is not possible. LUVMI is an appealing and cost-effective solution that could enable valuable scientific missions on the lunar poles. Researchers hope that LUVMI’s rover will be part of the upcoming European mission to the Moon by 2025.
Keywords
LUVMI, water, rover, Moon, robotic, chassis, adjustable suspension, drilling, autonomous, spectrometer, camera