LUVMI, un rover autonome capable de détecter de l’eau sur la Lune
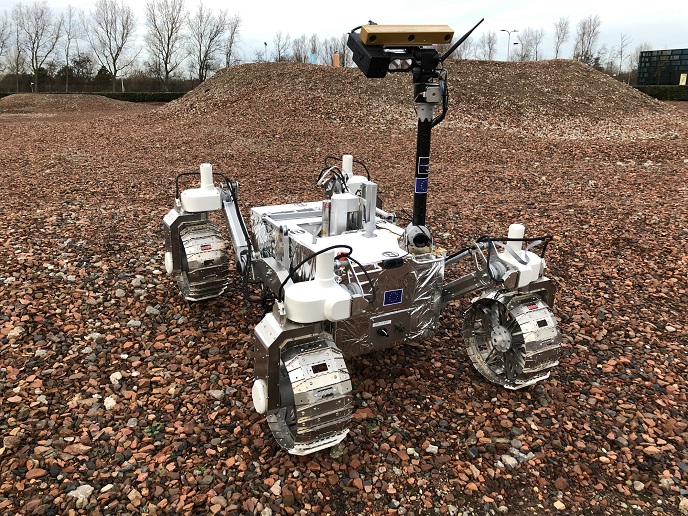
Les températures sur la Lune sont extrêmes, passant d’une chaleur infernale à un froid glacial, en fonction de la position apparente du Soleil dans le ciel lunaire. Dans les zones plongées en permanence dans l’ombre, les températures peuvent atteindre -230 degrés Celsius. Certaines observations nous montrent maintenant que les cratères ombragés des pôles lunaires sont susceptibles de cacher d’importantes réserves de glace, une ressource s’avérant précieuse dans l’espace. Compte tenu de ces observations, le projet LUVMI(s’ouvre dans une nouvelle fenêtre), financé par l’UE, a mis au point un prototype de rover léger – avec une charge utile compacte – qu’il est possible d’envoyer sur la Lune à la recherche d’eau, de minéraux ou d’autres ressources essentielles. L’eau: un élément essentiel à l’économie spatiale Le carburant, l’énergie et l’eau figurent parmi les quelques ressources primaires que les premiers voyageurs spatiaux pourraient utiliser comme monnaie d’échange. «L’eau, c’est l’or de l’espace et on peut la considérer comme la première étape de la construction d’une économie spatiale», note le Dr Jeremi Gancet, qui a dirigé le projet LUVMI. Tout le reste serait secondaire: les missions humaines pourraient récupérer la glace et la transformer en carburant ou en agent oxydant pour les engins spatiaux, ou bien l’utiliser comme eau potable. «Les qualités et les dimensions du rover LUVMI constituent un compromis idéal pour l’exploration future de la Lune», ajoute le Dr Gancet. Comme il l’explique plus en détail, les missions robotiques lunaires passées et actuelles se sont basées sur des plateformes robotiques beaucoup plus grandes, généralement cinq à dix fois plus lourdes que la plateforme LUVMI. En revanche, d’autres missions ont employé des plateformes beaucoup plus petites qui n’ont pas nécessairement apporté de résultats scientifiques significatifs. Par conséquent, le volume et le poids du système LUVMI – qui pèse environ 40 kg – en font un partenaire de choix pour les futures missions d’exploration lunaire entreprises par l’Agence spatiale européenne, d’autres organisations institutionnelles ou des sociétés privées. Adapter la conception pour les missions futures Les chercheurs ont mis au point un rover électrique à quatre roues de petite taille équipé d’un dispositif de forage et d’un spectromètre de masse pour détecter la présence d’eau et d’autres substances chimiques à la surface de la Lune. Une nouvelle caméra plénoptique fournissant des données 3D sur les endroits les plus favorables pour extraire de l’eau a également été testée. Une innovation essentielle, simplifiant le transport des échantillons, réside dans l’intégration compacte des outils d’analyse et d’échantillonnage des composés volatils. «Contrairement à la plupart des autres missions planétaires, nous n’allons pas “extraire” des échantillons, mais plutôt enfoncer l’instrument dans le régolithe et détecter les substances volatiles in situ», explique le Dr Gancet. L’instrument d’échantillonnage peut forer jusqu’à une profondeur de 20 cm. La mobilité du rover LUVMI s’articule autour du concept de structure mobile sur roues avec une suspension réglable qui permet de modifier la hauteur du châssis. Le fait de rehausser le châssis permet d’augmenter la garde au sol et de faciliter les déplacements dans les zones encombrées. De plus, la suspension réglable donne la possibilité de surmonter des obstacles de plus de 30 cm de hauteur. Cette innovation permet au rover de manipuler prudemment les instruments scientifiques et de s’adapter au terrain. Par ailleurs, le rover est conçu pour se déplacer de façon autonome, avec un guidage limité. Cette capacité, dont seuls les plus gros rovers disposent habituellement, permet au rover LUVMI de se déplacer en toute sécurité à la surface de la Lune lorsqu’il lui est impossible de communiquer avec la Terre. LUVMI constitue une solution attrayante et économique, qui offre la possibilité de mener des missions scientifiques de grande valeur au niveau des pôles lunaires. Les chercheurs du projet espèrent que le rover LUVMI fera partie de la prochaine mission lunaire européenne, d’ici 2025.