

New underwater inspection camera uses 3D time-of-flight technology
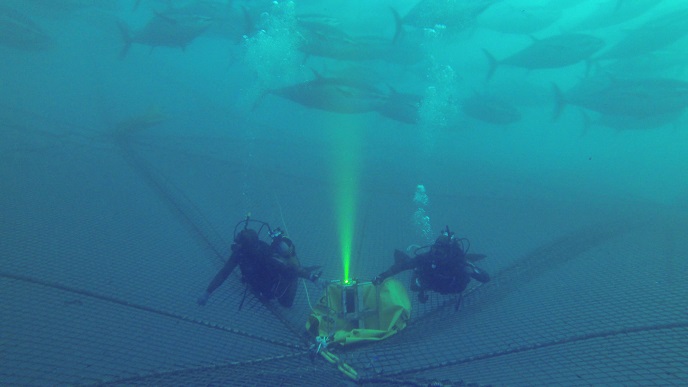
Particles suspended in water can result in turbid environments, and being opaque in appearance they impair visibility. Fog is a familiar example of this phenomenon where small water droplets in the air make visibility challenging for both humans and imaging systems. When driving in fog, turning on headlights actually blinds drivers, creating a ‘white-out’ effect whereby the headlights are reflected back by the fog – known as backscatter. The EU-supported UTOFIA (Underwater Time Of Flight Image Acquisition system) project tackled this imaging problem by emitting very short pulses of light, timed to match the shutter of a camera, as opposed to a continuous stream of light (as with the car headlights analogy). UTOFIA developed prototypes for a commercial underwater inspection system using 3D ‘time-of-flight’ technology, of interest for marine science, public sector environmental monitoring, commercial fisheries/aquaculture stock assessment and subsea technologies, such as seabed mapping. In the long term, the systems could aid the autonomous functioning of subsea vehicles. Generational improvements Explaining the principles behind the UTOFIA technology, project coordinator Mr Jens Thielemann says, “As light travels at a constant speed, the light reflected from turbid environment particles returns to the camera before the light reflected from the objects under observation. Closing the shutter when light arrives from the murk, while opening it for the light’s arrival from the objects, removes or reduces backscatter in the image.” Using this principle, the Pan-European team built their imaging system three times. Each time building on what had been learnt about the physical characteristics of the systems’ components, the team honed their time-of-flight methodology, developing a more detailed understanding of how solid-state technologies operate when exposed to nanosecond-long events. These efforts resulted in the system being reduced in size by a factor of six. Furthermore, the laser power increased by a factor of four and the precision of the 3D rendering increased to 10 times the original. As there is a range of potential applications, the technology was trialled for a number of scenarios. For example, in Spain the camera was used to estimate biomass for the aquaculture industry, with the team satisfied with both the 3D data and the resulting images. Equally promising were the initial tests for close-range underwater navigation systems for remotely operated and autonomous underwater vehicles (ROVs/AUVs), an avenue with much potential. Good seabed images could, for instance, be used both for quantitative assessment of littering and pollution (useful for policymaking and enforcement), and also as input for cleanup efforts. Perhaps the biggest potential lies in the automatic monitoring, quantitative assessment and characterisation (size, species and behaviour) of marine life. Watch this space Currently the team is working on the commercialisation of the technology through one of the project partners Subsea Tech, and anticipates making its first sales this year. “Before UTOFIA there was no full-field real-time 3D technology available with a range of several metres. Existing approaches either couldn’t provide a full image (just a single line that was scanned) or could only provide an incomplete image with limited 3D viewing range (stereo),” says Thielemann. “UTOFIA is also the first system to do range-gating using a CMOS array sensor, making it much more cost-effective.” To take the technology to the next level, the image processing algorithms will be further developed for the monitoring of aquaculture and fisheries. Towards this end, the team have secured funding for two follow-up projects, SMARTFISH and BIOSYS. There is even talk of taking the tech into outer space!



