

Les robots débarquent pour nettoyer nos sites nucléaires
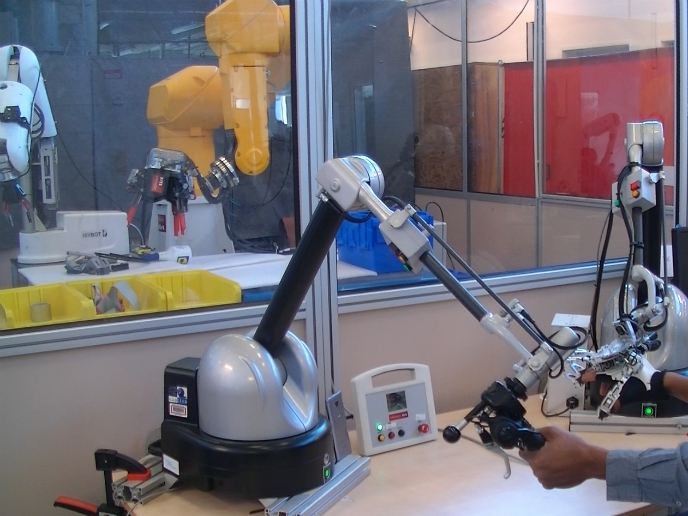
4,9 millions de tonnes de déchets nucléaires anciens se trouvent au Royaume-Uni, notamment des sous-produits provenant de la production d’armes pendant la Guerre froide. «Le nettoyage des déchets nucléaires anciens du Royaume-Uni constitue le plus grand projet de réhabilitation environnementale en Europe. Il devrait durer plus de 100 ans et coûter plus de 200 milliards d’euros. Au moins 20 % des travaux de démantèlement doivent être effectués par des robots», note le professeur Rustam Stolkin, qui coordonne le projet RoMaNS, financé par l’UE. Le projet a permis de faire la démonstration de technologies robotiques de pointe capables de mener à bien des tâches importantes dans des environnements dangereux, en toute sécurité et à moindre coût. Ces systèmes sophistiqués ont progressé au-delà de l’état de l’art en matière de vision robotique, de planification de mouvement, de contrôle et d’interfaces homme-robot. Il a également été démontré, pour la première fois, comment ces technologies pouvaient être appliquées aux problèmes sociétaux importants posés par les environnements nucléaires. Pourquoi les technologies actuelles s’avèrent-elles inefficaces? Un grand nombre de conteneurs de déchets qui se trouvent sur les anciens sites nucléaires, dont certains ont plus de 60 ans, doivent maintenant être ouverts, faire l’objet d’une enquête et d’un tri de leur contenu. Étant donné leurs divers niveaux de contamination, les déchets doivent être triés et séparés de manière à ce que les déchets faiblement contaminés soient placés dans des conteneurs de stockage de faible activité, plutôt que dans des conteneurs de stockage de haute activité, qui sont très coûteux. Étonnamment, les robots ont rarement été utilisés dans l’industrie nucléaire, à l’exception de quelques cas où des systèmes rudimentaires de contrôle à distance ont été déployés. «En règle générale, dans les environnements industriels dangereux, les mouvements des robots sont contrôlés par des opérateurs humains à l’aide de joysticks. Cette approche s’avère toutefois bien trop lente pour traiter l’énorme quantité de matériaux contaminés», note le professeur Stolkin. Quand les robots nucléaires et l’intelligence artificielle font équipe Utiliser des systèmes robotiques dotés d’intelligence artificielle pourrait transformer la façon dont les travailleurs interagissent avec les environnements nucléaires. Les robots contrôlés par intelligence artificielle peuvent exécuter rapidement des tâches qui s’avèrent extrêmement difficiles par le biais de la téléopération classique par joystick, comme la préhension d’objets. Outre le fait de développer des capacités autonomes permettant au robot de saisir et de manipuler automatiquement des objets, l’équipe de RoMaNS a développé de nouvelles technologies avancées pour la téléopération par des opérateurs humains. Il s’agissait notamment d’un bras de robot «esclave» résistant aux radiations, contrôlé grâce à un gant robotique, ou exosquelette haptique, porté par l’opérateur. Le robot esclave distant imite les mouvements de la main et des doigts de l’homme. Pendant ce temps, l’exosquelette haptique permet à l’être humain de ressentir les forces subies par le robot esclave lorsque ses doigts se rapprochent des objets. RoMaNS a travaillé à l’élaboration d’un concept de contrôle partagé dans le cadre duquel humains et intelligence artificielle collaborent pour contrôler un robot à distance. «Le contrôle partagé allie autonomie et téléopération. Les opérateurs humains peuvent par exemple contrôler le mouvement d’un bras de robot vers un objet, tandis que l’intelligence artificielle oriente automatiquement l’outil de préhension dans la bonne direction afin de bien saisir l’objet», explique le professeur Stolkin. Le contrôle partagé allie les exosquelettes haptiques issus de la recherche en téléopération avec les algorithmes d’IA développés dans le cadre de la recherche en robotique autonome. L’exosquelette haptique est capable de fournir des signaux indicateurs de force aux humains, de les inciter à se mouvoir dans des directions permettant, par exemple, des saisies stables d’après les algorithmes d’IA, ou d’éviter les collisions avec des obstacles. Contrairement aux robots classiques qui effectuent des mouvements préprogrammés répétitifs dans l’industrie manufacturière, la technologie RoMaNS est en mesure de traiter une grande variété d’objets et de matériaux, dans des situations non structurées et encombrées au sujet desquelles le robot ne dispose pas nécessairement d’informations préalables. Le système doit constamment planifier ses actions en temps réel en combinant les informations provenant de caméras ainsi que d’autres capteurs. «C’est la première fois dans le monde qu’un robot autonome, contrôlé par IA, a été déployé dans un environnement radioactif. Ce que RoMaNS a permis d’accomplir montre à quel point la robotique avancée peut sortir du monde des laboratoires et être déployée dans un secteur industriel peu enclin à prendre des risques et où la sécurité est une question critique», conclut le professeur Stolkin.



