

Stanno arrivando i robot a ripulire i nostri siti nucleari
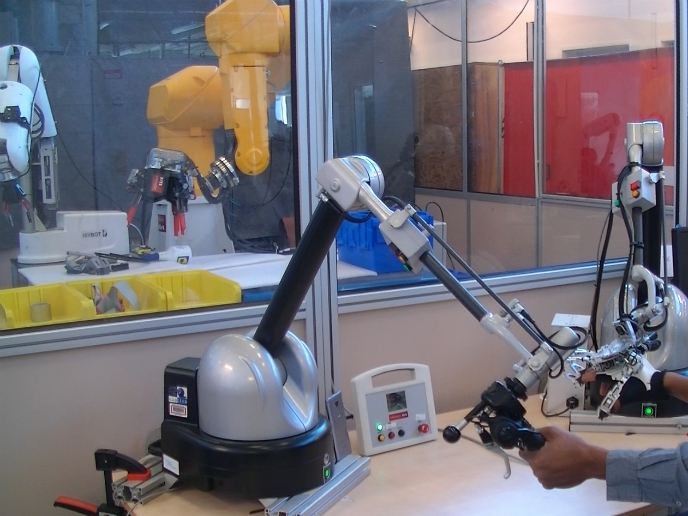
Il Regno Unito contiene 4,9 milioni di tonnellate di rifiuti nucleari preesistenti, in parte sottoprodotti della produzione di armi durante la guerra fredda. «Eliminare i rifiuti preesistenti del Regno Unito è il più grande progetto di bonifica ambientale in Europa; si prevede che duri più di 100 anni e che costi oltre 200 miliardi di euro. Almeno il 20 % del lavoro di smantellamento deve essere effettuato da robot», osserva il professor Rustam Stolkin, che ha coordinato il progetto RoMaNS, finanziato dall’UE. Il progetto ha dimostrato delle tecnologie robotiche avanzate in grado di portare a termine, in modo sicuro ed efficace dal punto di vista dei costi, compiti importanti in ambienti pericolosi. Lo sviluppo di questi sistemi raffinati li ha portati a superare lo stato dell’arte per quanto riguarda visione robotica, pianificazione dei movimenti, controllo e interfacce uomo-robot. È stato inoltre dimostrato, per la prima volta, in che modo queste tecnologie possano essere applicate ai problemi socialmente importanti rappresentati dagli ambienti nucleari. Perché la tecnologia attuale è inefficace Numerosi contenitori di rifiuti che si trovano in siti nucleari preesistenti, alcuni dei quali vecchi di 60 anni, devono ora essere riaperti, esaminati, e il loro contenuto deve essere smistato. Dal momento che contengono vari livelli di contaminazione, i rifiuti devono essere smistati e separati, in modo che quelli a bassa attività siano collocati in contenitori per lo stoccaggio adeguati, piuttosto che occupare dei contenitori molto costosi per lo stoccaggio di rifiuti ad alta attività. Nell’industria nucleare è stato fatto un uso incredibilmente limitato dei robot, a parte alcuni casi in cui sono stati utilizzati rudimentali sistemi di controllo remoto. «Generalmente, i movimenti dei robot negli ambienti industriali pericolosi sono controllati da operatori umani mediante joystick. Tuttavia, questo approccio risulta eccessivamente lento per trattare l’enorme quantità di materiale contaminato», osserva il prof. Stolkin. I robot nucleari incontrano l’intelligenza artificiale L’intelligenza artificiale nei sistemi robotici potrebbe trasformare il modo in cui i lavoratori interagiscono con gli ambienti nucleari. Dei robot controllati dall’intelligenza artificiale possono eseguire rapidamente dei compiti, come ad esempio afferrare oggetti, che sono estremamente difficili usando la convenzionale telemanipolazione mediante joystick. Oltre a sviluppare delle capacità autonome, in cui il robot afferra e manipola in modo automatico gli oggetti, il team di RoMaNS ha sviluppato nuove tecnologie avanzate per la telemanipolazione da parte di operatori umani. Questo ha incluso un braccio «servo» robotico resistente alle radiazioni controllato da un guanto robotico, o esoscheletro aptico, indossato dall’operatore. Il servo robotico remoto replica i movimenti della mano e delle dita dell’operatore umano. Contemporaneamente, l’esoscheletro aptico consente all’operatore di sentire le forze che subisce il servo robotico mentre le sue dita si stringono attorno agli oggetti. RoMaNS ha lavorato in vista di un concetto di controllo condiviso in cui gli esseri umani e l’intelligenza artificiale collaborano per controllare un robot remoto. «Il controllo condiviso mette insieme autonomia e telemanipolazione. Per esempio, operatori umani possono controllare il movimento di un braccio robotico verso un oggetto, mentre l’intelligenza artificiale orienta automaticamente la pinza nella giusta direzione per ottenere una buona presa dell’oggetto», schematizza il prof. Stolkin. Il controllo condiviso mette insieme gli esoscheletri aptici della ricerca sulla telemanipolazione, con gli algoritmi IA sviluppati nella ricerca sulla robotica autonoma. L’esoscheletro aptico può fornire segnali relativi alla forza agli operatori, esortandoli ad andare in direzioni che secondo gli algoritmi IA porteranno ad esempio a prese solide, o a evitare collisioni con ostacoli. A differenza dei robot convenzionali che effettuano movimenti ripetitivi pre-programmati nell’industria manifatturiera, la tecnologia RoMaNS può maneggiare un’ampia varietà di oggetti e materiali, in luoghi non strutturati e disordinati, dei quali il robot potrebbe non avere alcuna conoscenza pregressa. Il sistema deve pianificare costantemente le sue azioni in tempo reale, mettendo insieme le informazioni provenienti da telecamere e altri sensori. «Questa è la prima volta al mondo in cui un robot autonomo controllato dall’intelligenza artificiale è stato messo in campo in un ambiente radioattivo. Il risultato ottenuto da RoMaNS dimostra in che modo la robotica avanzata sia in grado di uscire dai confini del laboratorio ed essere schierata in un’industria estremamente avversa al rischio e critica per la sicurezza», conclude Stolkin.



