Significant tasks from nano-hands

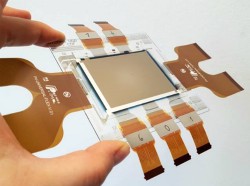
Project MICRON aims to expand the use of robots into the nano-world by developing a prototype multi-microrobot manipulating system. Small mobile robots equipped with on board electronics will cooperate autonomously, carrying out tasks ranging from the assembly of micro-parts to the handling of biological cells. One of the key steps in realising this goal has been the development of a mixed signal Application Specific Integrated Circuit, ASIC. This is essentially the mode with which communication to and from the robots is achieved. The controller integrated chip receives instructions which are then transformed to the requested action. These actions can be the control of tools through the use of an on-chip proportional integral device and the sending of information of the sensors involved and the micro-robot. In order to carry out these tasks, an ASIC was selected due to its good performance with regard to size and power requirements. The mixed signal circuit works at 3.3 V, is 16 mm² in size, and of its 84 pins, 27 are used to connect the core with the other components. The controller has a Global Asynchronous Local Synchronous (GALS) architecture. As such, locally clocked synchronous components are connected through asynchronous communication lines. Thus, unlike purely asynchronous design, the existing synchronous tools can be used for most of the development process, while the implementation can exploit the more efficient asynchronous communication schemes. Where closed loop control is required, a digital Proportional Integral Device (PID) has been implemented. Due to their flexibility, the same PID hardware can be used by several tools. Communication between the robot and the host computer is executed through the use of Infra Red (IR) communication, with data rates ranging from slow IR (9.6 kbits/s) to fast IR (4 Mbits/s). Communication and development with interested parties will lead the prototypes to licensing and marketing in the microelectronics industry.