

Platoon driving inches a step closer
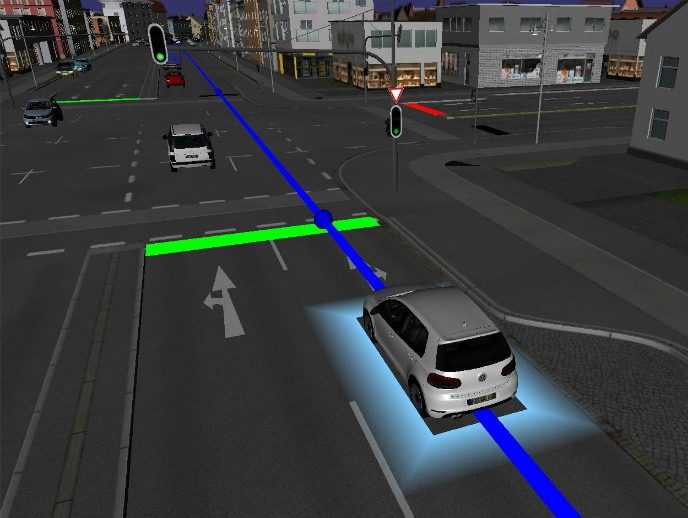
Automated and connected vehicle technologies are gradually becoming more prominent in newer vehicles. There is no doubt that the digital connectivity between vehicles, and between vehicles and transport infrastructure will considerably influence mobility and urban living. A promising possibility to enhance traffic efficiency is the formation of dynamic platoons as a group of cooperative automated vehicles at city level and more precisely on signalized junctions where the greatest effect is expected. Effective platoon management together with speed advice calculation based on signal phase and timing information will enable a platoon to pass a signalised intersection in the most efficient manner. The EU-funded project MAVEN(opens in new window) worked on several possible paths to make the technology a reality. It provided novel solutions for managing automated vehicles in urban environments with signalised intersections and mixed traffic. “Project work revolved around developing algorithms for organising the flow of infrastructure-assisted vehicles and structuring the negotiation processes between vehicles and the roadside infrastructure,” explains lead researcher Mr Robbin Blokpoel. Innovative applications The gradual introduction of automated vehicles into a mixed traffic stream needs careful management to achieve the necessary safety and efficiency levels. Information and communication technologies that directly link vehicles to their physical surroundings will greatly support this transition period. MAVEN researchers worked to extend existing communication standards to support the newly developed concepts for safety and efficiency. An outstanding example of a cooperative intelligent transportation system is the green light optimal speed advisory (GLOSA) service. This is now combined with a bi-directional negotiation process to achieve mutually beneficial updates to the signal plan. Vehicles ‘talk’ to the traffic lights to indicate various trip details, which enhance the estimation of the queue length at intersections. Fusing of this data is an important yet rarely modelled or quantified phenomenon in mixed traffic streams and is critical to the GLOSA functionality to achieve high traffic control efficiency. As a result, more accurate GLOSA instructions including lane advice could be sent back to the vehicles. Another major focus of MAVEN was on developing algorithms for smart and efficient traffic light control. “Finding the balance between being flexible for maximum traffic efficiency and predictable for services towards connected and automated vehicles such as GLOSA is vital - MAVEN found new algorithms to get the best of both worlds,” explains Mr Blokpoel. In addition, the project team developed novel local level routing techniques that help find optimal routes using short-term predictions based on local information exchanged between vehicles and infrastructure. Protecting vulnerable road users and drivers of automated vehicles is a key objective of MAVEN. The project developed new functions for advanced driver-assistance systems that reduce the risk of collision with cyclists or obstacles and safely handle human-controlled vehicles trying to interfere with a platoon. With the impact assessment of MAVEN currently on its way, researchers can already conclude that the combined innovative applications could eliminate stopping at intersections completely, resulting in a CO2 reduction of 80 tonnes per year per intersection. Enabling technologies High-definition map data is a key feature for enabling highly automated driving. Researchers identified the need to represent road intersections as a ‘corridor’ – a pair of virtual boundary lines that connect lane markings of inbound lanes to markings of outbound lanes. This should prevent vehicles from invading conflicting zones when making turns at intersections. Finally, MAVEN’s new roadmap for introducing vehicle-road automation should help road authorities further understand changes in their role and the tasks of traffic management systems.



