Les robots collaboratifs travaillent comme des humains, avec des humains

L’industrie 4.0 est en train de révolutionner l’industrie manufacturière, mais son plein potentiel ne pourra être exploité que si les humains et les robots travaillent ensemble, la technologie soutenant activement le rôle prépondérant des humains. Le projet SHERLOCK(s’ouvre dans une nouvelle fenêtre), financé par l’UE, a permis de surmonter les principaux obstacles au déploiement à grande échelle de la collaboration homme-robot (CHR). Ses technologies robotiques innovantes, dotées de l’intelligence mécatronique(s’ouvre dans une nouvelle fenêtre) et d’une cognition basée sur l’IA, rendent possible une CHR sûre, efficace et très performante.
Collaboration homme-robot: le travail d’équipe concrétise le rêve
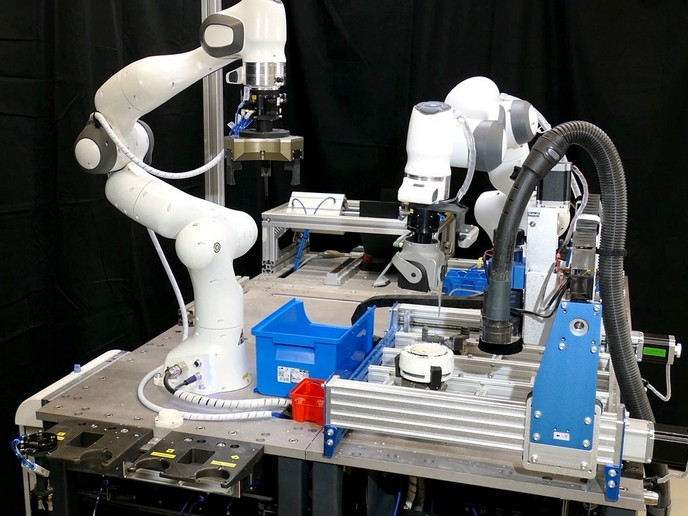
Les applications industrielles de la CRH sont nombreuses et variées La combinaison des composants de l’incroyable boîte à outils des technologies SHERLOCK a permis à quatre applications industrielles de dépasser leurs objectifs de performance. SHERLOCK a amélioré le tout premier robot collaboratif à forte charge et a validé la manipulation de lourds panneaux solaires tout en utilisant l’IA pour adapter son comportement lors de la présentation des pièces à l’opérateur. «La durée du cycle a été réduite d’environ 18 %, et le poids maximal que devait manipuler l’opérateur est passé de 42 kg auparavant (nécessitant deux opérateurs) à 2 kg», explique Nikos Dimitropoulos du Laboratory for Manufacturing Systems and Automation(s’ouvre dans une nouvelle fenêtre) (LMS) de l’Université de Patras en Grèce, et coordinateur du projet. «Le robot à forte charge favorisera ainsi l’inclusivité», fait-il remarquer, «en réduisant les obstacles à l’emploi auxquels sont confrontés les opérateurs présentant des limitations physiques.» Sotiris Makris, chef du groupe «Robots, automatisation et réalité virtuelle dans la fabrication» chez LMS, poursuit: «Notre robot collaboratif à faible charge soutenu par un jumeau numérique sophistiqué sans égal peut planifier des tâches en temps réel en utilisant des données intégrées provenant de capteurs distribués. Notre robot s’est chargé du rivetage pendant l’assemblage de modules industriels, tandis que l’opérateur travaillait simultanément sur la même pièce grâce aux innovations de sécurité de SHERLOCK.» Le module de perception de l’IA du robot a détecté environ la moitié des erreurs d’assemblage les plus courantes, et la durée du cycle a été réduite d’environ 40 %. L’exosquelette semi-actif de SHERLOCK, doté d’une perception robotique des actions humaines pilotée par l’IA, peut automatiquement moduler son assistance en temps réel. L’exosquelette permet une formation reposant sur la RV pour les nouveaux opérateurs et fournit des instructions fondées sur la RA pour les opérateurs en poste. Son utilisation a permis de réduire les erreurs d’assemblage de grandes machines à commande numérique par ordinateur. Enfin, «le robot mobile à deux bras de SHERLOCK a été utilisé pour le transport collaboratif de grandes pièces aérospatiales composites. Le contrôle avancé de l’impédance et les interfaces RA intuitives lui ont permis de suivre et d’assister sans effort le mouvement de l’opérateur», explique Sotiris Makris. Ainsi, le nombre d’opérateurs nécessaires pour déplacer les grandes pièces a pu être réduit, ce qui a donné ces derniers la possibilité de se concentrer sur d’autres activités à valeur ajoutée.
Un comportement presque humain grâce à l’IA et une programmation facile favorisent l’acceptation des robots par l’homme
SHERLOCK a démontré des gains évidents de performance, d’ergonomie et d’acceptation par les opérateurs par rapport aux applications CHR précédentes. «Dans quatre scénarios industriels, les robots SHERLOCK ont perçu l’environnement et les besoins et préférences des opérateurs, ont anticipé l’intention humaine et ont adapté leur comportement en conséquence grâce à une perception et une prise de décision pilotées par l’IA. Les opérateurs sont passés de la curiosité à l’enthousiasme et ont fini par considérer les robots comme des collaborateurs précieux», fait remarquer Nikos Dimitropoulos. La programmation des robots s’est avérée encore plus simple que prévu, permettant aux ingénieurs de production de reconfigurer les systèmes en quelques heures au lieu de quelques jours, sans connaissances ni formation préalables. La facilité de programmation et l’assistance substantielle aux opérateurs réduiront de nombreux obstacles à l’emploi liés à l’âge, au genre, à la condition physique et à la formation. SHERLOCK a révélé le potentiel réel des systèmes robotiques d’assistance hautement intelligents. La CHR est passé de la recherche à l’application, trois produits ayant été lancés au cours de la durée du projet. L’équipe continuera à perfectionner les résultats clés du projet CONVERGING.