Robot collaborativi che lavorano come e con le persone

L’Industria 4.0 sta innescando una rivoluzione nella produzione; tuttavia, sarà possibile sfruttarne il pieno potenziale quando esseri umani e robot lavoreranno insieme, e la tecnologia sosterrà attivamente il ruolo di spicco delle persone. Il progetto SHERLOCK(si apre in una nuova finestra), finanziato dall’UE, ha saputo sormontare gli ostacoli più difficili al dispiegamento capillare della collaborazione uomo-robot (HRC, Human-Robot Collaboration). Le sue tecnologie innovative dotate di meccatronica(si apre in una nuova finestra) intelligente e cognizione basata sull’IA, permettono l’affermarsi di questo tipo di collaborazione, rendendola sicura, efficiente e altamente efficace.
La collaborazione uomo-robot: il lavoro di squadra che esaudisce i desideri
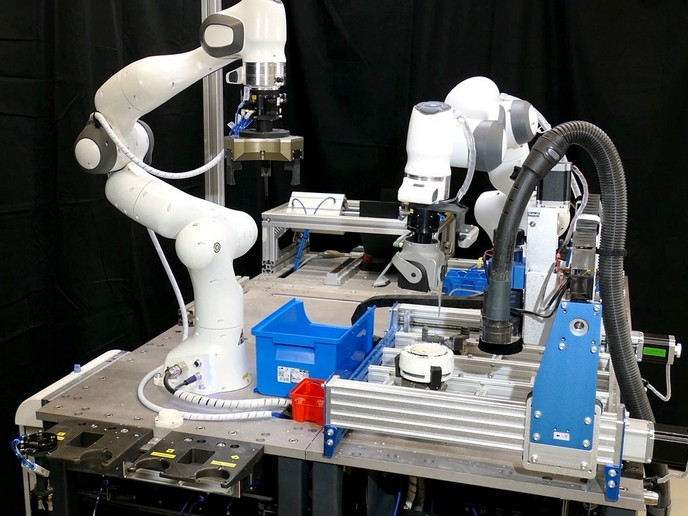
Non esiste una soluzione unica quando si tratta dell’applicazione industriale della collaborazione uomo-robot. La combinazione dei vari componenti dello straordinario kit di tecnologie di SHERLOCK ha prodotto soluzioni per quattro applicazioni industriali volte a oltrepassare gli obiettivi di prestazione. SHERLOCK ha migliorato il primo robot collaborativo ad alto carico in assoluto, convalidandone la manipolazione di pannelli solari pesanti e utilizzando l’IA per adeguarne il comportamento durante la presentazione delle parti all’operatore. «La durata del ciclo è stata accorciata di circa il 18 %, e il peso massimo maneggiato dall’operatore è passato dai precedenti 42 kg, che richiedeva l’intervento di due operatori, ad appena 2 kg», spiega il coordinatore del progetto, Nikos Dimitropoulos del Laboratorio per i sistemi di produzione e l’automazione(si apre in una nuova finestra) (LMS) presso l’Università di Patrasso, in Grecia. «Pertanto, il robot ad alto carico sosterrà l’inclusività», osserva, «riducendo gli ostacoli all’occupazione degli operatori con limitazioni fisiche.» Sotiris Makris, responsabile della sezione robot, automazione e realtà virtuale del gruppo di produzione presso LMS, continua: «Il nostro robot collaborativo a basso carico, assistito da un impareggiabile gemello digitale avanzato, è in grado di eseguire la pianificazione dei compiti in tempo reale, utilizzando i dati integrati provenienti da sensori distribuiti. Il nostro robot si è occupato della rivettatura durante l’assemblaggio di moduli industriali, mentre l’operatore lavorava contemporaneamente sullo stesso pezzo grazie ai dispositivi di sicurezza innovativi di SHERLOCK.» Il modulo di percezione basato sull’IA del robot ha rilevato circa la metà degli errori di assemblaggio più comuni, riducendo così di circa il 40 % la durata del ciclo. L’esoscheletro semi-attivo di SHERLOCK, provvisto di percezione robotica delle azioni umane alimentata dall’IA, ha la capacità di modulare automaticamente la sua assistenza in tempo reale. L’esoscheletro fornisce formazione basata sulla realtà virtuale ai nuovi operatori e istruzioni operative basate sulla realtà aumentata. Il suo impiego ha diminuito gli errori di assemblaggio di grandi macchine a controllo numerico. Infine, «il robot mobile a due braccia di SHERLOCK è stato usato per il trasporto collaborativo di parti aerospaziali composite di grandi dimensioni. Il controllo avanzato dell’impedenza e le interfacce a RA intuitive hanno permesso al robot di seguire e assistere agevolmente i movimenti dell’operatore», spiega Makris. La soluzione ha abbassato il numero necessario di operatori per la movimentazione di parti di grandi dimensioni, liberandoli così da questo compito e permettendo loro di concentrarsi su altre attività a valore aggiunto.
Un comportamento simile a quello umano alimentato dall’IA e la facile programmazione promuovono l’accettazione umana
SHERLOCK ha dimostrato il conseguimento di guadagni evidenti nelle prestazioni, nell’ergonomica e nell’accettazione degli operatori rispetto a precedenti applicazioni HRC. «Nell’ambito di quattro scenari industriali, i robot di SHERLOCK hanno percepito l’ambiente, le esigenze e le preferenze degli operatori, prevedendo le loro intenzioni e adeguando conseguentemente il proprio comportamento grazie alla percezione e al processo decisionale trainati dall’IA. Gli operatori sono passati dalla curiosità all’entusiasmo, considerando in definitiva i robot validi collaboratori», sottolinea Dimitropoulos. I robot erano persino più semplici da programmare del previsto, permettendo ai tecnici di produzione di riconfigurare i sistemi in un lasso di ore anziché giorni, senza bisogno di conoscenze pregresse o formazione. La facilità di programmazione e la notevole assistenza agli operatori abbatterà numerosi ostacoli all’occupazione riconducibili a età, genere, limiti fisici o formativi. SHERLOCK ha svelato l’effettivo e concreto potenziale di sistemi robotici altamente intelligenti e ausiliari. La collaborazione uomo-robot è uscita dalla sfera della ricerca per approdare a quella dell’applicazione, accompagnata dal rilascio di tre prodotti durante il progetto. Il gruppo continuerà ad affinare i risultati principali nel corso del progetto CONVERGING.