

Le positionnement mondial à la rescousse du nanodomaine
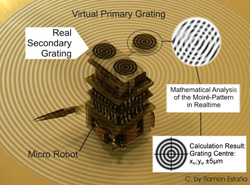
La précision est l'aspect le plus important dans la course aux nanotechnologies. Un projet de R&D audacieux financé par le programme Information Society Technologies (IST) a concentré ses efforts sur la création de microrobots capables d'opérer dans le nanodomaine. Les ingénieurs à la tête de ce projet ont compris l'importance d'avoir un feedback immédiat et précis de la position exacte des microrobots. Alors que les équipements GPS (Global Positioning System, système de positionnement mondial) sont précis au mètre près, l'université de Karlsruhe devait mettre au point un système capable d'offrir une précision de l'ordre du micromètre. Ils ont réalisé cette prouesse en exploitant l'effet optique de moiré qui intervient lorsqu'une image est superposée sur une autre. Le système de micro-positionnement (MPS, Micro Positioning System) capture les images d'une grille spécialement conçue fixée au microrobot à l'aide d'une caméra à dispositif à transfert de charge (DTC). Une deuxième grille virtuelle est alors générée par le logiciel MPS et la combinaison des deux grilles produit des franges de moiré. La composante de traitement des images du logiciel MPS résout ensuite un système d'équations mathématiques afin de déterminer la position de l'objet avec une précision de l'ordre du micron. En plus d'offrir une précision exceptionnelle, le MPS garantit en outre une réponse presque en temps réel de l'ordre de deux dixièmes de seconde et est capable de calculer simultanément la position de 30 objets distincts au maximum. Enfin, un soin particulier a été apporté au système pour garantir la convivialité de l'interface entre l'utilisateur et le logiciel MPS. L'université de Karlsruhe a introduit une demande de brevet pour le MPS et est à la recherche de possibilités de collaboration en vue de personnaliser le MPS pour d'autres applications.