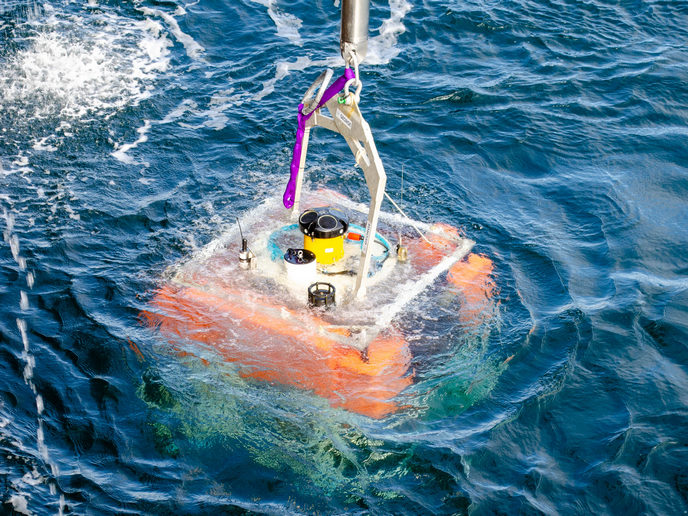
Robots on the seafloor

Collecting environmental data from the seafloor is crucial for evaluating weather trends, monitoring sea life and furthering science. While sensors have helped in gathering valuable data, the costs of bringing them to the surface are very high. The EU-funded project AUTODROP worked on a novel solution to overcome this challenge. Conducting in-depth research for new vehicle prototype requirements, the project team designed the new rudder assembly and defined the vehicle cargo capacity. It finalised the design of sub-systems such as landing gear and hull size, as well as the communication system involved. The project team envisioned a vertical vehicle that would drop fast to the desired location, supported by negative gravity and weight. As AUTODROP worked on the prototype, it saw the potential not only in designing a generic tool that deploys sensors but also an excellent solution for improved seabed seismic operation. Other possible future markets for a vehicle of this type include underwater exploration for natural resources such as oil and gas. Much effort was directed to creating an embedded control system software and mission data communication, as well as navigation and estimation software. The various sub-systems were tested for their viability with palpable success, getting the team much closer to building an effective vehicle prototype as projected. While the team made significant headway in designing a successful concept, it stopped short from building the prototype due to the project's complexity and the additional resources required. Nonetheless, the technology envisioned is very promising and the research has undoubtedly opened new avenues to building a viable prototype in the future. As the market trend continues to point towards robotisation of operating sensor nodes, project results could have a profound impact on below-sea activity if or when they are exploited.