Robots en el fondo del mar

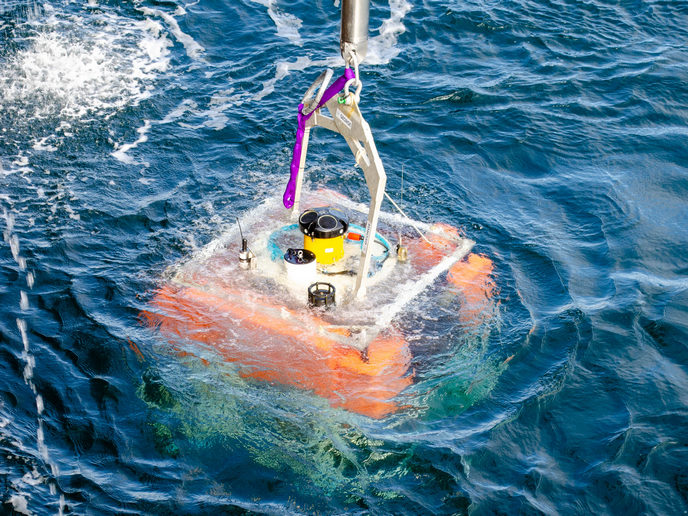
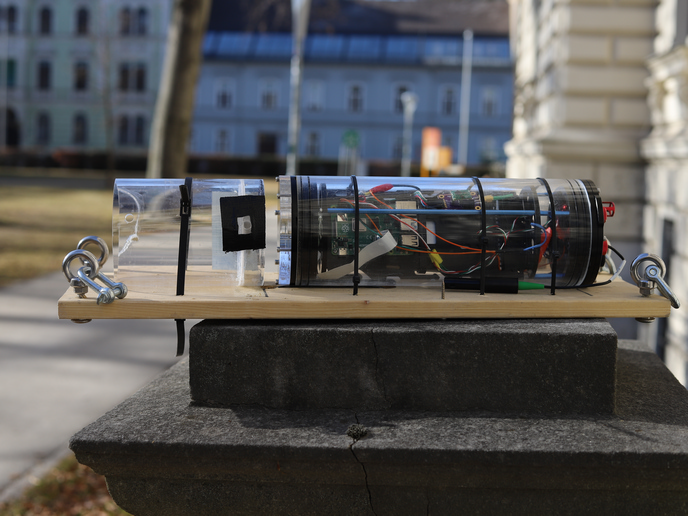
La recopilación de datos del fondo marino es esencial para evaluar tendencias climáticas, monitorizar la vida marina y profundizar en el conocimiento científico. Aunque los sensores han ayudado a recopilar datos valiosos, el coste de llevarlos hasta la superficie es muy elevado. El proyecto AUTODROP, financiado por la Unión Europea, trabajó sobre una solución nueva para superar este desafío. Mediante un estudio en profundidad de los requisitos del prototipo de vehículo, el equipo del proyecto diseñó la nueva estructura del timón de dirección y definió la capacidad de carga del vehículo. Además, se completó del diseño de subsistemas como el mecanismo de aterrizaje y el tamaño del casco, así como el sistema de comunicación necesario. El equipo del proyecto diseñó un vehículo vertical que cayese rápidamente hacia la ubicación deseada, con la intervención de la gravedad negativa y el peso. Durante el trabajo sobre el prototipo de AUTODROP, no solo se observaron posibilidades en el diseño de una herramienta genérica que implante sensores, sino también una solución excelente para operaciones sísmicas mejoradas sobre el fondo marino. Otros posibles mercados futuros para un vehículo de este tipo incluyen la exploración subacuática en busca de recursos naturales como petróleo y gas. Se dedicó un esfuerzo importante en la creación de un sistema de control integrado y de comunicación de los datos de misión, así como en software de navegación y estimación. Se probaron los distintos subsistemas para verificar su viabilidad con un éxito notable, lo cual acerca mucho al equipo a construir un verdadero prototipo de vehículo tal como se ha diseñado. Si bien el equipo avanzó de forma importante en el diseño de un concepto adecuado, se quedó a las puertas de construir el prototipo debido a la complejidad del proyecto y los recursos adicionales necesarios. Sin embargo, la tecnología diseñada es muy prometedora y, sin duda, la investigación ha abierto nuevos caminos para construir un prototipo viable en el futuro. A medida que la tendencia del mercado sigue apuntando hacia la robotización de los nodos de sensores en funcionamiento, la aplicación de los resultados del proyecto podría tener un efecto muy importante sobre la actividad submarina.