Des robots sur le sol marin

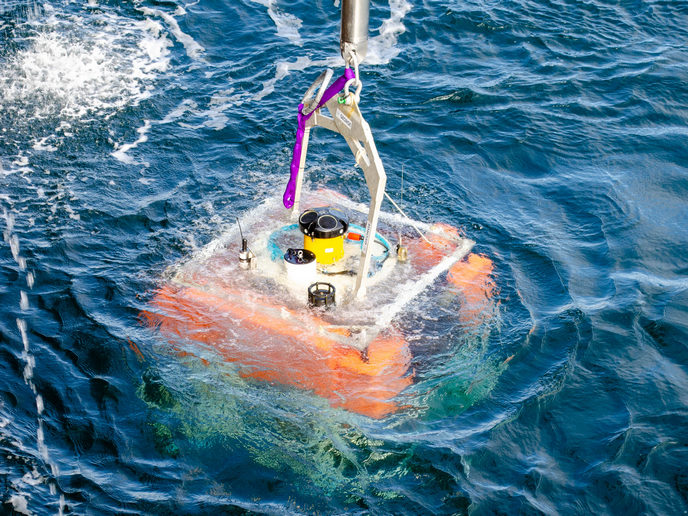
La collecte de données environnementales sur le fond marin est cruciale pour l'évaluation des tendances météorologiques, le suivi de la vie marine et le progrès scientifique. Bien que les sondes aient aidé à rassembler des données utiles, leur remontée à la surface coûte cher. Sous le patronage de l'UE, le projet AUTODROP a planché sur une solution novatrice pour relever ce défi. Grâce à une recherche approfondie sur les exigences du nouveau prototype, l'équipe a conçu le nouveau gouvernail et défini la capacité de chargement du véhicule. Elle a achevé la conception des sous-systèmes, tels que le train d'atterrissage et le format de la coque, ainsi que du système de communication. L'équipe envisage un véhicule vertical capable d'arriver rapidement sur site grâce à la gravité négative et à son poids. Tandis qu'AUTODROP travaillait sur le prototype, les chercheurs en ont vu le potentiel notamment sous forme d'un outil générique capable de déployer les sondes, mais aussi comme une solution permettant un meilleur suivi de l'activité sismique au niveau des fonds marins. L'exploration sous-marine des gisements de pétrole et de gaz pourrait également représenter un marché potentiel pour ce type de véhicule. Une grosse partie du travail a été consacrée à la mise en place d'un logiciel de contrôle intégré, à la communication des données de mission, ainsi qu'au logiciel de navigation et d'estimation. Les résultats des tests de fonctionnement des sous-systèmes ont été probants et ont permis à l'équipe d'approcher son objectif, à savoir la fabrication d'un prototype efficace. Bien que les chercheurs soient parvenus à avancer vers un concept, elle a renoncé à fabriquer le prototype en raison de la complexité du projet et les ressources supplémentaires nécessaires. Néanmoins, la technologie envisagée est particulièrement prometteuse et les recherches ont indubitablement ouvert la voie à la conception d'un prototype viable à l'avenir. Tandis que le marché continue d'évoluer vers la robotisation des nœuds de sondes, les résultats du projet pourraient avoir un impact considérable sur l'activité sous-marine le cas échéant.