

Des composants flexibles à base d’élastomères diélectriques pour révolutionner les robots mous
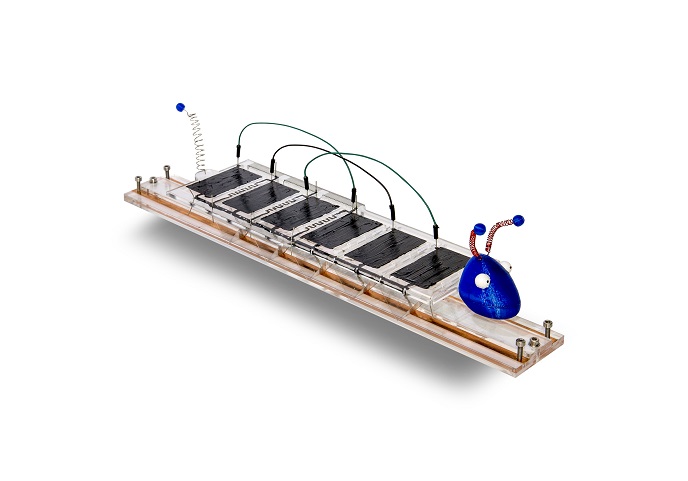
Normalement, les robots traditionnels sont constitués d’éléments rigides et lourds, comme les moteurs, les boîtes à engrenage et les couplages rigides. Ces composants leur permettent d’effectuer des mouvements et des processus complexes mais, dans la plupart des cas, ils les rendent incapables de réaliser des mouvements qui imitent les modèles biologiques. Les DEA changent les règles du jeu Le projet ANSWER, coordonnée par l’Université technique de Dresde(s’ouvre dans une nouvelle fenêtre) a cherché à changer la donne. «Notre objectif consiste à intégrer la détection, le traitement des signaux et le déclenchement, en utilisant uniquement des DEA flexibles dans des structures robotiques molles sans l’électronique classique», fait remarquer le professeur Gerald Gerlach, coordinateur du projet et titulaire d’une bourse Marie Curie. Les DEA permettent à des mécanismes flexibles de se comporter comme des muscles artificiels. Habituellement, ils sont composés de membranes élastomères tendues au préalable, mécaniquement, et d’électrodes conformes. Comme ils sont légers, ils peuvent effectuer des efforts impressionnants semblables à ceux des muscles. Même si contrôler les DEA s’avère complexe, coûteux et demande des unités de commande électronique externes, «ils peuvent également agir comme capteurs et interrupteurs piézorésistifs (interrupteurs élastomères diélectriques ou DES), permettant l’intégration de fonctions de contrôle et de surveillance dans les composants élastiques eux-mêmes», fait remarquer le professeur Gerlach. Vers un robot mou autonome sans composants électroniques «Le résultat principal obtenu par notre projet est d’avoir fait la démonstration d’un large éventail de composants électroniques à base d’élastomères diélectriques (DE) et de structures actives, contrôlées par ces composants», détaille le professeur Gerlach. Pour y parvenir, la première étape du projet consistait à développer les notions de base de la conception robotique biomimétique à base de DE et des sous-unités fonctionnelles. En outre, l’équipe a dérivé analytiquement et numériquement les modes mécaniques des matériaux élastomères utilisés, et a développé un modèle fonctionnel d’éléments finis qui a été validé par des expériences. Le premier robot semi-mou sans composants électroniques, connu sous le nom de Trevor the Caterpillar (Trevor la Chenille), et une étude pour élaborer une aile semblable à celles des libellules, baptisée Jule Dragonfly, ont fait l’objet d’un développement, d’un assemblage et d’essais. À Dresde, le développement de la robotique molle s’est poursuivi et a généré plusieurs démonstrateurs fonctionnels. Des technologies de fabrication comme l’impression à jet d’encre, le moulage par injection et le dépôt par aérosol ont été examinées et utilisées pour produire des démonstrateurs de robotique molle. Surmonter les obstacles Le passage de structures artisanales à base de DE à des structures d’impression à jet d’encre s’est avéré constituer une tâche difficile pour ANSWER. Afin d’aborder cet obstacle et de favoriser une meilleure compréhension des propriétés de l’encre, «le projet a introduit des technologies rapprochées, comme le dépôt par aérosol de différentes encres qui a été utilisé pour produire et faire la démonstration de diverses structures robotiques à base de DE et de composants pour le traitement des signaux», explique le professeur Gerlach. En exploitant le savoir-faire généré pendant ce développement, ANSWER a été capable d’utiliser l’impression à jet d’encre sur des DEA et DES fonctionnels et l’équipe travaille désormais sur d’autres démonstrateurs. Les prochaines étapes Le professeur Gerlach fait remarquer que «le projet produira le premier robot biomimétique, à base de DE, totalement conforme et sans composants électroniques classiques du monde». Ce robot nécessitera seulement une tension d’alimentation directe pour accomplir les tâches biomimétiques prévues et interagir de manière intelligente avec son environnement. De plus, les résultats et le savoir-faire acquis dans le cadre du projet ANSWER sont actuellement utilisés dans plusieurs projets de recherche à l’Université technique de Dresde et seront utilisés à l’avenir dans des projets de recherche collaborative entre cette université et l’Université d’Auckland. ANSWER prévoit de commercialiser certains de ces résultats par l’intermédiaire d’une start-up. Ils examinent actuellement les opportunités de financement pour y parvenir.



