

Giętkie komponenty z dielektrycznych elastomerów rewolucją dla miękkich robotów
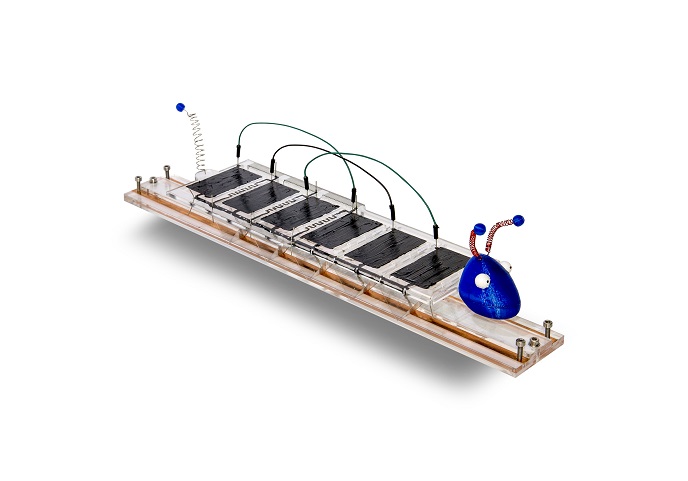
Tradycyjne roboty zbudowane są z ciężkich i sztywnych podzespołów, takich jak silniki, skrzynie biegów i sztywne sprzęgła. Te elementy umożliwiają im wykonywanie złożonych ruchów i procesów, jednak, w większości przypadków, sprawiają, że roboty takie nie są zdolne do wykonywania ruchów, które naśladowałyby modele biologiczne. DEA zmieniają zasady gry Projekt ANSWER, koordynowany przez Politechnikę Drezdeńską(odnośnik otworzy się w nowym oknie), chce zmienić ten stan rzeczy. „Naszym celem jest zintegrowanie odczytywania, przetwarzania sygnałów i napędu wykorzystując jedynie elastyczne DEA w miękkich strukturach automatycznych bez zastosowania konwencjonalnych układów elektronicznych”, podkreśla profesor Gerald Gerlach, koordynator projektu i stypendysta programu „Maria Skłodowska-Curie”. DEA sprawiają, że elastyczne mechanizmy mogą się zachowywać jak sztuczne mięśnie. Zazwyczaj składają się z elastomerowych membran poddanych uprzednio mechanicznym naprężeniom oraz zgodnych elektrod. Ponieważ są bardzo lekkie, mogą osiągać imponujące, podobne do mięśni, naprężenie. Choć kontrola DEA jest bardzo złożona, kosztowna i wymaga zewnętrznych jednostek kontrolnych, „mogą one zachowywać się jak czujniki i piezorezystancyjne przełączniki (dielektryczne przełączniki elastomerowe – ang. dielectric elastomer switches, DES), umożliwiając integrację monitorowania i funkcji kontrolnych w samych zgodnych komponentach”, podkreśla profesor Gerlach. W kierunku autonomicznych miękkich robotów bez elektroniki „Najważniejszym osiągnięciem projektu jest to, że udało nam się zademonstrować działanie szerokiej grupy opartych na dielektrycznych elastomerach podzespołów i kontrolowanych przez nie struktur aktywnych”, wskazuje profesor Gerlach. Aby to osiągnąć, pierwsza faza projektu skupiała się na opracowaniu podstawowych koncepcji miękkich, biomimetycznych, wykorzystujących dielektryczne elastomery robotów i funkcjonalnych podjednostek. Co więcej, zespół analitycznie i mechaniczne wyprowadził mechaniczne tryby tworzyw elastomerowych i opracował roboczy skończony model elementu, który został eksperymentalnie zwalidowany. Opracowano, złożono i poddano testom pierwszego elektronicznego, wolnego, półmiękkiego robota o nazwie Trevor the Caterpillar, a także przeprowadzono badania skrzydła ważki o nazwie Jule Dragonfly. Rozwój miękkiej robotyki w Dreźnie na tym się nie zatrzymał i zaowocował kilkoma funkcjonalnymi robotami demonstracyjnymi. Zbadano technologie wytwarzania, takie jak druk atramentowy, formowanie wtryskowe i natryskiwanie aerozoli, które następnie wykorzystano do produkcji miękkich robotów demonstracyjnych. Pokonywanie przeszkód Znaczącym wyzwaniem, z jakim zmierzył się projekt ANSWER, była zamiana wykonanych ręcznie struktur na struktury wykonane metodą druku atramentowego. Aby pokonać tę przeszkodę i zgłębić wiedzę o właściwościach atramentu, „projekt wprowadził technologie pomostowe, takie jak aerozolowe natryskiwanie różnych atramentów, które zostały wykorzystane do produkcji i zademonstrowania różnych napędzanych dielektrycznymi elastomerami struktur automatycznych i podzespołów przetwarzających sygnały”, tłumaczy prof. Gerlach. Wykorzystując know-how pozyskany podczas tego procesu rozwojowego, projekt ANSWER mógł techniką druku atramentowego wytworzyć funkcjonalne DEA i DES, a obecne prowadzi prace nad kolejnymi modelami demonstracyjnymi. Kolejne etapy Profesor Gerlach podkreśla: „Projekt ten umożliwi uzyskanie pierwszego na świecie całkowicie zgodnego, biomimetycznego robota wykorzystującego dielektryczne elastomery bez konwencjonalnych układów elektronicznych”. Robot ten będzie wymagał jedynie prądu stałego, aby pełnić całkowicie biomimetyczne, przewidziane dla niego zadania i wchodzić w inteligentne interakcje ze swoim środowiskiem. Ponadto, wyniki i know-how zebrane dzięki projektowi ANSWER są obecnie wykorzystywane w kilku projektach badawczych na Politechnice Drezdeńskiej i zostaną wykorzystane w przyszłych opartych na współpracy projektach badawczych tego uniwersytetu i Uniwersytetu w Auckland. ANSWER planuje komercjalizację niektórych wyników poprzez założenie start-upu. Aby to osiągnąć, zespół sprawdza obecnie, jakie są możliwości finansowania w tym zakresie.



