

Unos componentes de elastómeros dieléctricos flexibles que revolucionarán los robots blandos
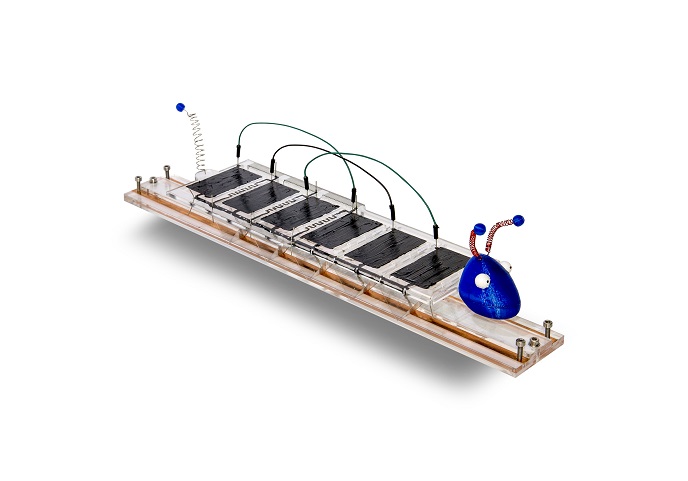
Los robots tradicionales suelen estar formados por componentes rígidos pesados como motores, cajas de engranajes y articulaciones rígidas. Estos componentes les permiten realizar procesos y movimientos complejos pero, en la mayoría de los casos, les impiden llevar a cabo movimientos que imiten los modelos biológicos. Los DEA cambian las reglas del juego El proyecto ANSWER, coordinado por la Universidad Técnica de Dresde, TU Dresden(se abrirá en una nueva ventana), se propuso cambiar dicha situación. «Nuestro objetivo es integrar la detección, el procesamiento de señales y el accionamiento utilizando únicamente DEA flexibles en estructuras robóticas blandas sin electrónica convencional», describe el profesor Gerald Gerlach, coordinador del proyecto y titular de una beca Marie Curie. Los DEA permiten desarrollar mecanismos flexibles que se comportan como músculos artificiales. Normalmente consisten en membranas de elastómeros previamente tensadas y electrodos flexibles. Dado que son ligeros, pueden producir impresionantes tensiones similares a las de los músculos. Aunque controlar los DEA resulta complejo, caro y requiere unidades de mando electrónicas externas, «también pueden actuar como sensores e interruptores piezorresistentes (interruptores de elastómeros dieléctricos o DES), lo cual permite la integración de funciones de supervisión y control en los propios componentes flexibles», destaca el profesor Gerlach. Avances hacia un robot blando autónomo sin componentes electrónicos «El principal resultado del proyecto es que hemos comprobado una amplia variedad componentes electrónicos basados en elastómeros dieléctricos (DE, por sus siglas en inglés) y estructuras activas controladas por ellos», señala el profesor Gerlach. Para lograrlo, la primera fase del proyecto consistió en desarrollar los conceptos básicos de unidades secundarias funcionales y diseños de robots de DE biomiméticos blandos. Además, el equipo derivó analítica y numéricamente los modos mecánicos de los materiales de elastómeros empleados y desarrolló un modelo de elementos finitos operativo que se validó experimentalmente. Desarrollaron el primer robot semiblando sin componentes electrónicos, bautizado como Trevor the Caterpillar (Trevor la oruga) y, además, elaboraron, montaron y comprobaron un estudio para un ala de libélula, conocido como Jule Dragonfly (Jule Libélula). En Dresde, se prosiguió con el desarrollo de la robótica blanda y se obtuvieron diversos demostradores funcionales. Se investigaron y emplearon tecnologías de fabricación como la impresión por inyección de tinta, el moldeado por inyección y la deposición por aerosol para producir demostradores de robótica blanda. Superación de los obstáculos El paso de estructuras de DE caseras a las de inyección de tinta constituyó una tarea complicada para ANSWER. Para abordar este obstáculo y fomentar una mayor comprensión de las propiedades de la tinta, «el proyecto introdujo tecnologías puente, tales como la deposición por aerosol de diferentes tintas que se han utilizado para producir y comprobar diversos componentes de procesamiento de señales y estructuras robóticas accionadas por DE», añade el profesor Gerlach. Al aprovechar los conocimientos técnicos generados durante tal desarrollo, ANSWER fue capaz de imprimir por inyección de tinta DEA y DES funcionales y ahora está trabajando en otros demostradores. Los siguientes pasos El profesor Gerlach destaca lo siguiente: «El proyecto conducirá al primer robot de DE biomimético totalmente flexible y sin componentes electrónicos convencionales del mundo». Ese robot solo requerirá tensión de corriente continua para llevar a cabo tareas predeterminadas y biomiméticas, así como para interactuar de forma inteligente con su entorno. Además, los resultados y los conocimientos técnicos obtenidos por ANSWER actualmente se están utilizando en diversos proyectos de investigación en la TU Dresden y se emplearán en futuros proyectos de investigación colaborativa entre esta universidad y la Universidad de Auckland. ANSWER tiene previsto comercializar algunos de los resultados en el marco de una empresa incipiente. Para ello, están estudiando las oportunidades de financiación.



