

Les «insbots» offrent des indices sur la prise de décision chez les insectes
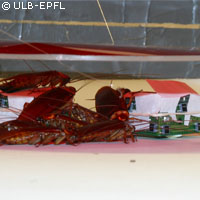
Une étude financée par l'UE a mis en pratique les théories de comportement collectif chez les insectes en prenant pour modèle un groupe de blattes. Dans le cadre du projet LEURRE, une équipe de scientifiques a introduit de petits robots autonomes dans une communauté d'insectes et a analysé leur interaction. D'après un rapport publié dans la revue Science, l'expérience a montré que les modes d'auto-organisation des blattes et, par conséquent, leur prise de décision, pouvaient être influencés et contrôlés par les robots, et ce dès que les micro-robots ressemblant aux insectes (insbots) étaient socialement intégrés. Dans le cadre de cette expérience, les chercheurs ont enveloppé les insbots dans du papier préalablement recouvert d'un mélange de composants chimiques (une sorte de phéromone) qui permet aux insectes de s'identifier entre eux. Aucune ressemblance physique n'existait entre les «blattes-robots» et leurs homologues naturels. Afin de déterminer si les insectes et les insbots pourraient en effet interagir, les chercheurs ont établi une «arène» composée de deux «abris» afin que le groupe de blattes fasse son choix entre les deux. «Lors de la première série d'expériences, les abris étaient parfaitement identiques», a expliqué le spécialiste en biologie théorique Jose Halloy de l'université libre de Bruxelles lors d'un entretien avec la revue Science. «Si les blattes choisissaient au hasard, 50% des insectes se dirigeraient vers l'un des abris et 50% vers l'autre. Cependant, dans ce cas, 90% des insectes se sont retrouvés sous le même abri. Autrement dit, la communauté d'insectes a choisi cet abri.» Dans la seconde série d'expériences, le professeur Halloy et son groupe de recherche ont donné au groupe mixte d'insectes et de robots le choix entre un abri obscur et un autre plus lumineux. «Les blattes préfèrent les lieux obscurs», a déclaré le professeur Halloy. En modulant le comportement des robots et en les faisant préférer des abris plus lumineux, les chercheurs ont tenté d'influencer la prise de décision collective du système. Le résultat s'est avéré positif dans certains cas. Dans d'autres cas, les robots ont toutefois suivi les blattes sous l'abri plus obscur. «Les robots se sont en quelque sorte laissés mener vers l'abri le plus obscur par le système en raison de l'interaction sociale», a fait remarquer le professeur Halloy. «La même explication est valable pour les blattes: bien qu'elles aient préféré le lieu obscur car elles ont tenu compte de la présence des autres, y compris des robots, elles se sont dirigées vers l'abri lumineux en raison des interactions sociales et non pas par préférence individuelle uniquement.» Cependant, les statistiques ont montré qu'environ 60% du temps, les insbots ont influencé les blattes à choisir l'abri plus lumineux. Les scientifiques en ont conclu que le comportement des animaux vivant en communauté peut être étudié et contrôlé à l'aide de dispositifs intelligents et autonomes. «Les ingénieurs s'intéressent beaucoup à la construction de systèmes autonomes, de groupes de robots ayant la capacité de résoudre des problèmes», a déclaré le professeur Halloy. «La prochaine étape consistera à mettre en place des groupes de systèmes et d'animaux artificiels pouvant coopérer afin de résoudre des problèmes. Ainsi, la machine écoute et perçoit les actions des animaux, puis ces derniers perçoivent et comprennent ce que les appareils leurs communiquent.» En pratique, des robots tels que ceux utilisés dans l'expérience LEURRE pourraient contribuer à la lutte antiparasitaire en attirant les insectes dans des pièges. D'autre part, des versions de robots plus grands pourraient même un jour aider à rassembler le bétail, a suggéré le professeur Daniela Rus du Massachusetts Institute of Technologie (MIT) aux États-Unis. Par ailleurs, l'étude LEURRE pourrait offrir de nouvelles informations en termes d'exploitation du concept d'auto-organisation pour la coordination de systèmes multi-robots autonomes tels que les systèmes d'essaims robotiques, pour lesquels l'auto-organisation constitue le mécanisme principal de coordination. Le projet LEURRE d'une valeur de 2 millions EUR a reçu un financement de 1,5 millions EUR de l'UE au titre du cinquième programme-cadre (5e PC).