

"Insektoboty" rzucają światło na zachowanie owadów podczas podejmowania decyzji
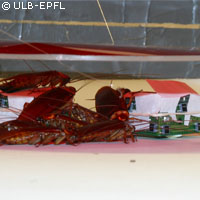
Partnerzy badania finansowanego ze środków UE sprawdzili w praktyce teoretyczne koncepcje dotyczące zbiorowego zachowania owadów, wykorzystując jako model grupę karaluchów. W ramach prac związanych z projektem LEURRE naukowcy wprowadzili do grupy owadów małe, autonomiczne roboty i analizowali zachodzące interakcje. Jak stwierdzono w sprawozdaniu opublikowanym w czasopiśmie "Science" doświadczenie wykazało, że po integracji mikrorobotów ("insektobotów") ze społecznością karaluchów mogły one wpływać na wzorce samoorganizacji tych owadów - a więc kształtować i kontrolować proces podejmowania przez nie decyzji. Badacze osiągnęli to owijając insektoboty papierem spryskanym mieszaniną związków chemicznych - rodzajem feromonu, który owady wykorzystują do wzajemnej identyfikacji. Między "karaluchobotami" i prawdziwymi owadami nie było podobieństwa fizycznego. Aby określić, czy owady i insektoboty będą rzeczywiście wchodziły w interakcje, badacze przygotowali "arenę" z dwiema "kryjówkami", między którymi grupa mogła wybierać. - W pierwszej serii doświadczeń kryjówki były dokładnie takie same - wyjaśnił biolog teoretyczny dr Jose Halloy z Wolnego Uniwersytetu Brukselskiego w wywiadzie dla czasopisma "Science". - Gdyby wybierały losowo, mielibyśmy 50 procent osobników po jednej stronie i 50 procent po drugiej. Ale w tym przypadku zaobserwowaliśmy, że 90 procent osobników znalazło się w jednej kryjówce, co oznacza, że wybrały tę kryjówkę grupowo. W drugiej serii doświadczeń dr Halloy i jego grupa badawcza dali mieszanej grupie owadów i robotów wybór między ciemną kryjówką a jaśniejszą. - Karaluchy w naturalny sposób wolą kierować się do ciemnych miejsc - powiedział dr Halloy. Modyfikując zachowanie robotów i powodując, by wybierały one jaśniejsze kryjówki, badacze starali się wpłynąć na zbiorowe podejmowanie decyzji w tym systemie i w pewnych wypadkach im się to udawało, natomiast w innych roboty podążały za karaluchami do ciemniejszej kryjówki. - Roboty były w jakiś sposób kierowane do ciemnej kryjówki przez system w wyniku oddziaływania społecznego. I to samo dotyczy karaluchów: chociaż wolą przebywać w ciemnym miejscu, biorą pod uwagę obecność innych osobników, w tym robotów, i ostatecznie wybierają jasne miejsce wskutek oddziaływań społecznych, a nie dlatego, że kierują się tylko indywidualnymi preferencjami - wskazał dr Halloy. Jednak statystyki wykazały, że w około 60 procentach przypadków insektobotom udało się przeforsować wybór jaśniejszej kryjówki. Naukowcy wyciągają wniosek, że zachowanie zwierząt żyjących w grupach można badać i kontrolować przy pomocy inteligentnych, autonomicznych urządzeń. - Inżynierowie są bardzo zainteresowani budowaniem autonomicznych systemów, grup robotów zdolnych do rozwiązywania problemów - powiedział dr Halloy. - Następnym krokiem będzie budowanie grup sztucznych systemów i zwierząt, które będą w stanie współpracować w rozwiązywaniu problemów. A więc maszyna słucha i dostrzega co robią zwierzęta, a zwierzęta dostrzegają i rozumieją, co im mówią maszyny. W praktyce roboty takie jak te wykorzystane w doświadczeniu LEURRE mogłyby pomagać w zwalczaniu szkodników, wabiąc owady do pułapek; z kolei ich większe wersje mogłyby nawet zaganiać zwierzęta gospodarskie do stada, zasugerowała dr Daniela Rus z Massachusetts Institute of Technology (MIT) w USA. Ponadto badanie LEURRE mogłoby dostarczyć nowych spostrzeżeń dotyczących wykorzystania koncepcji samoorganizacji do koordynowania autonomicznych systemów wielorobotowych, na przykład systemów "rojowych", w których samoorganizacja wykorzystywana jest jako główny mechanizm koordynacji. Projekt LEURRE, dysponujący budżetem w wysokości 4,2 miliona euro, otrzymał z piątego programu ramowego UE (5PR) kwotę 1,5 miliona euro.