

«Insbots» arrojan luz sobre los mecanismos de decisión de los insectos
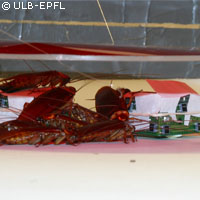
Un estudio financiado con fondos comunitarios ha puesto en práctica las teorías de la conducta colectiva entre los insectos utilizando como modelo a un grupo de cucarachas. En el seno del proyecto Leurre, los científicos colocaron robots pequeños y autónomos en un grupo de insectos y analizaron su interacción. Según un informe publicado en la revista Science, este experimento demostró que, mediante robots, podía influirse en los patrones de autoorganización de las cucarachas y, por tanto, en sus decisiones, una vez que estos microrrobots similares a insectos («insbots») se habían integrado socialmente. Esto lo lograron los investigadores envolviendo los «insbots» en un papel espolvoreado con una mezcla de compuestos químicos (un tipo de feromona) que utilizan los insectos para identificarse entre sí. No había ningún parecido físico entre los «robots-cucaracha» y las cucarachas. A fin de determinar si los insectos y los «insbots» interactuarían realmente, los investigadores dispusieron un terreno en el que había dos «refugios» entre los que podía elegir el grupo. «En la primera tanda de experimentos, los refugios eran exactamente idénticos», explicó el Dr. José Halloy, especialista en biología teórica de la Universidad Libre de Bruselas, en una entrevista publicada en la revista Science. «Si escogieran al azar, el 50% de las cucarachas se metería en un refugio, y el otro 50% en el otro. Pero en este caso hicimos que el 90% de los individuos se metiera en el mismo refugio, lo que significa que lo eligieron como grupo.» En la segunda tanda de experimentos, el Dr. Halloy y sus colegas dieron al grupo mixto de insectos y robots dos elecciones: un refugio oscuro y otro con más luz. «Por naturaleza, las cucarachas prefieren meterse en lugares oscuros», explicó el Dr. Halloy. Al modular el comportamiento de los robots y haciendo que prefirieran los refugios más iluminados, los investigadores se propusieron influir en las decisiones colectivas del sistema, y lo lograron en algunos casos, mientras que en otros los robots siguieron a las cucarachas al refugio más oscuro. «De algún modo, el sistema, por efecto de la interacción social, atrajo a los robots al refugio más oscuro», informó el Dr. Halloy. «Y lo mismo ocurre con las cucarachas: aunque prefieren estar en un lugar oscuro porque tienen en cuenta la presencia de otros individuos, entre ellos los robots, acaban entrando al lugar más iluminado por las interacciones sociales, no porque obedezcan únicamente a sus preferencias individuales.» Sin embargo, las estadísticas mostraron que, aproximadamente en el 60% de las veces, los «insbots» inclinaron la balanza a favor del refugio más iluminado. Los científicos concluyen que el comportamiento de los animales que viven en grupo puede estudiarse y controlarse con dispositivos autónomos inteligentes. «A los ingenieros les interesa mucho construir sistemas autónomos, grupos de robots capaces de solucionar problemas», aseguró el Dr. Halloy. «El paso siguiente será construir grupos de sistemas artificiales y animales que sean capaces de cooperar para resolver problemas. Así, la máquina estará atenta y percibirá lo que hacen los animales, mientras que los animales percibirán y comprenderán lo que les dicen las máquinas.» En la práctica, robots como los usados en el experimento Leurre podrían facilitar el control de plagas conduciendo a los insectos hacia trampas. Versiones más grandes podrían, algún día, ayudar a conducir al ganado, según indicó la Dra. Daniela Rus del Instituto Tecnológico de Massachusetts (MIT) de Estados Unidos. Además, el estudio Leurre podría ofrecer perspectivas nuevas sobre el aprovechamiento del concepto de la autoorganización para coordinar sistemas de multirrobots autónomos, como los sistemas de enjambres de robots, que emplean la autoorganización como mecanismo principal de coordinación. El proyecto Leurre, cuyo presupuesto es de 2 millones de euros, recibió 1,5 millones de euros en fondos comunitarios mediante el Quinto Programa Marco (5PM).