

Unos robots inteligentes pueden aprender a reciclar «hardware» peligroso
Los residuos electrónicos son el flujo de residuos que más rápido crece en la Unión Europea, pero se reciclan menos del 40 %(se abrirá en una nueva ventana). El desmantelamiento de teléfonos inteligentes, ordenadores y otros aparatos domésticos es un trabajo complejo y potencialmente peligroso para las personas. Muchos de estos dispositivos se construyeron con la ayuda de la robótica avanzada. ¿Podrían estas máquinas ayudar también a su eliminación? Los robots suelen estar programados para ejecutar tareas dentro de un rango repetitivo limitado. El proyecto IMAGINE(se abrirá en una nueva ventana) (Robots Understanding Their Actions by Imagining Their Effects), financiado con fondos europeos, ha desarrollado un sistema inteligente que permite que un robot «entienda» cómo desmantelar una versión de un dispositivo con el que no se haya encontrado antes. Incluso un dispositivo pequeño puede tener cientos de tornillos y retirarlos manualmente puede ser una tarea laboriosa. «Como resultado, siempre que surgen estos costosos procedimientos de reciclaje, el reciclaje no se lleva a cabo en la práctica», explica Justus Piater, coordinador del proyecto y director del Centro de Ciencia Digital(se abrirá en una nueva ventana) de la Universidad de Innsbruck (Austria). Más bien, puede llevar a una eliminación que suponga un riesgo para la salud y el medio ambiente, añade Piater. El proyecto de cuatro años de duración aumenta las capacidades de un robot al mejorar su adaptabilidad, percepción y autonomía a la hora de tomar decisiones mediante la combinación de aprendizaje automático con simulaciones basadas en la física de lo que el robot podría encontrarse en un dispositivo. Pieter afirma: «Nuestro mayor avance es el aspecto altamente interactivo del sistema para desmantelar parcial o totalmente objetos que no ha visto nunca, de una forma que no podría haberse planeado o programado desde cero porque la información, simplemente, no estaba ahí».
Sistema inteligente
Piater explica: «Una de las principales novedades es que el sistema puede activar la simulación física para estimar la utilidad de ciertas acciones. Si se estima esto por adelantado, entonces se puede reunir experiencia y estadísticas que describan la utilidad de dichas acciones de forma que, la próxima vez, pueda ayudar a tomar una decisión mejor. El sistema aprende de ello». Las simulaciones basadas en la física generan y visualizan objetos y su interacción con el entorno. Las imágenes de la cámara de un dispositivo se analizan para detectar oportunidades de acción, conocidas como «posibilidades», las cuales pueden ser desatornillar, hacer palanca, empujar y girar, agitar, etc. Las capacidades perceptivas, como la detección o el reconocimiento de objetos o la estimación de la posición y la orientación de los componentes, fueron mejoradas por el equipo de IMAGINE. También desarrollaron nuevos sistemas de detección de cabezas de tornillo, detectores de posibilidades específicas y detectores del cableado interno de dispositivos electrónicos. Piater indica: «Contamos con unas capacidades perceptivas de última generación, especialmente la percepción visual, y hemos desarrollado una funcionalidad específica nueva».
Planificación innovadora
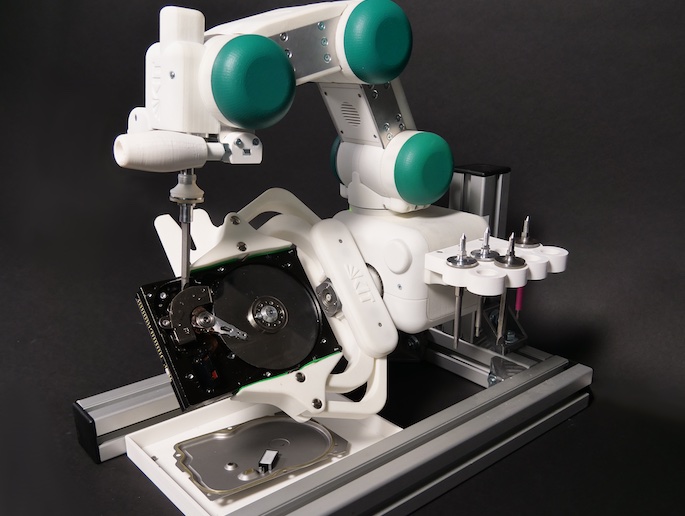
En cuanto a la planificación, Piater comenta lo siguiente: «Se desarrolló un sistema de planificación especial que decide qué acción realizar después, no solo eligiendo una de las posibilidades para actuar, sino también mirando hacia el futuro y planificando lo máximo posible». Esto puede basarse en la interacción simulada o real. Los planificadores existentes están formulados matemáticamente para construir un plan completo o ningún plan. Piater explica: «Si no pueden lograr el objetivo, no tienen forma de averiguar si alguna opción puede ser útil. Pero el planificador desarrollado por el equipo de IMAGINE sabe cómo avanzar, aunque no pueda producir un plan completo, al igual que haríamos los humanos». Se diseñó específicamente un sofisticado agarre robótico multifuncional con un cambiador de herramientas integrado para el desmantelamiento de dispositivos electrónicos de pequeño tamaño. Se entrenó al sistema demostrador para desmantelar discos duros de ordenadores y también puede gestionar algunos tipos de unidades de procesamiento gráfico. A lo que Piater añade: «Dejamos que el robot realizase toda la operación muchas veces y analizase el estado anterior y posterior, y dejamos que el robot aprendiera de esa experiencia».



