

Des robots intelligents peuvent apprendre à recycler du matériel dangereux
Bien que les rebuts électroniques représentent le flux de déchets à la croissance la plus rapide dans l’UE, seuls moins de 40 % sont recyclés(s’ouvre dans une nouvelle fenêtre). Le démontage des smartphones, des ordinateurs et d’autres gadgets domestiques est une tâche complexe et potentiellement dangereuse pour l’homme. Un grand nombre de ces appareils ont été assemblés grâce à une robotique avancée. Ces machines pourraient-elles également nous aider à les éliminer? Les robots sont généralement programmés pour exécuter des tâches faisant appel à une série limitée de répétitions. Le projet IMAGINE(s’ouvre dans une nouvelle fenêtre) (Robots Understanding Their Actions by Imagining Their Effects), financé par l’UE, a mis au point un système intelligent permettant à un robot de «comprendre» comment démonter la version d’un appareil qu’il n’a jamais rencontrée auparavant. Même un petit appareil peut comporter des centaines de vis, potentiellement fastidieuses à démonter manuellement. «Par conséquent, chaque fois que ces coûteuses procédures de recyclage se présentent, le recyclage n’est tout simplement pas effectué», explique Justus Piater, coordinateur du projet et directeur du Digital Science Center(s’ouvre dans une nouvelle fenêtre) de l’Université d’Innsbruck, en Autriche. Au lieu de quoi, l’objet est généralement mis au rebut, ce qui pose un risque pour la santé et l’environnement, ajoute-t-il. Le projet, d’une durée de quatre ans, accroît les capacités d’un robot en améliorant son adaptabilité, sa perception et son autonomie en matière de prise de décision. Il combine l’apprentissage automatique avec des simulations physiques de ce que le robot est susceptible de rencontrer dans un appareil. «L’aspect hautement intégratif du système constitue notre plus grande avancée: il démonte partiellement ou totalement des objets qu’il n’a jamais vus auparavant, d’une manière qui n’aurait pas pu être planifiée ni programmée à partir de zéro, faute d’informations adéquates», explique Justus Piater.
Un système intelligent
Une nouveauté majeure du système réside dans sa capacité à déclencher une simulation physique pour estimer la pertinence de certaines actions, explique Justus Piater. «Si vous pouvez estimer cela à l’avance, vous pouvez alors recueillir l’expérience et les statistiques qui décrivent l’utilité de ces actions, ce qui vous permettra de prendre une meilleure décision la fois suivante. Le système en tire des enseignements.» La simulation physique génère et visualise les objets tout comme leurs interactions avec l’environnement. Les images prises par la caméra d’un dispositif sont analysées afin de détecter les possibilités d’action, appelées «affordances», qui peuvent inclure le dévissage, l’utilisation d’un levier, l’éloignement et la rotation, les secousses, etc. L’équipe IMAGINE a amélioré certaines capacités de perception, comme la détection ou la reconnaissance d’objets ou l’estimation de la position et de l’orientation des pièces. Elle a également mis au point de nouveaux systèmes de détection des têtes de vis, des détecteurs d’affordance spécifiques et des détecteurs de câblage à l’intérieur des dispositifs électroniques. «Nous disposons de capacités de perception, notamment visuelle, à la pointe de la technologie et nous avons développé de nouvelles fonctionnalités spécifiques», fait remarquer Justus Piater.
Une planification innovante
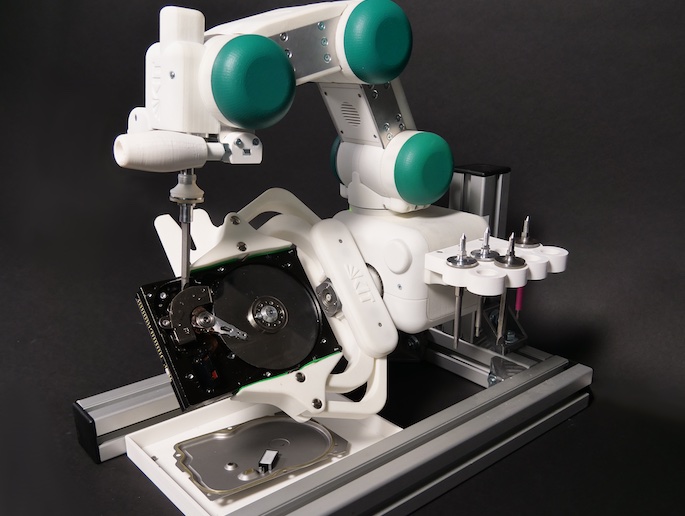
En termes de planification, Justus Piater déclare: «Nous avons développé un système de planification spécial qui décide de la prochaine action à entreprendre, non seulement en choisissant l’une des affordances sur laquelle agir, mais également en envisageant l’avenir et en élaborant un plan aussi complet que possible.» Cela peut être basé sur une interaction simulée et réelle. Les planificateurs actuels sont formulés mathématiquement pour construire un plan complet ou pas de plan du tout. «S’ils ne peuvent pas atteindre leur objectif, ils n’ont aucun moyen de déterminer si une action serait utile. Mais le planificateur développé par l’équipe IMAGINE sait comment progresser même s’il ne peut pas élaborer un plan complet, exactement comme le feraient les humains», fait-il remarquer. Une pince robotique multifonctionnelle sophistiquée munie d’un changeur d’outils intégré a été spécialement conçue pour le démontage de petits appareils électroniques. Le système de démonstration a été entraîné à démonter des disques durs d’ordinateurs et peut également manipuler certains types d’unités de traitement graphique. «Nous avons laissé le robot effectuer plusieurs fois l’ensemble de l’opération et avons analysé l’état avant et après et laissé le robot apprendre de cette expérience», ajoute Justus Piater.



