Control flexible y robusto de la posición de robots móviles
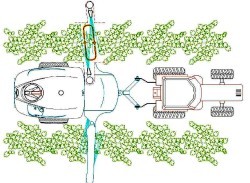
Los microsistemas y las nanotecnologías están experimentando un desarrollo vertiginoso y ofrecen aplicaciones fundamentales en numerosos campos, como la automoción, la medicina, la biotecnología, las telecomunicaciones y la electrónica de consumo, por mencionar sólo unos cuantos ejemplos. Uno de los parámetros principales para que prosiga la expansión de estas tecnologías es la disponibilidad de instrumentos operativos adecuados. Para responder a esta necesidad, el proyecto MICRON ha generado un prototipo de sistema de manipulación de múltiples microrrobots con el que manejar objetos mesoscópicos y de tamaño micrométrico con una precisión nanométrica. Este sistema se compone de un conjunto de pequeños robots móviles que cooperan de forma autónoma para efectuar tareas delicadas, como la manipulación de células biológicas y el montaje de micropiezas. Concentrado en desarrollar el prototipo de este sistema, este proyecto dio lugar a varios productos y procesos innovadores, entre estos un sistema robusto y flexible para el control de la posición. La gran complejidad de las tareas que se deben realizar requiere un control eficaz y adaptable del comportamiento dinámico de los robots empleados. Por este motivo se tuvieron en cuenta varios aspectos, entre ellos los movimientos, completamente distintos, de los diversos robots que forman parte del sistema. Los robots también pueden diferenciarse en el tamaño y las órdenes de movimiento, por ejemplo el número de grados mecánicos de libertad. La gran complejidad de las tareas asignadas puede acarrear fácilmente que, con el tiempo, vayan cambiando las condiciones y los parámetros. Además, la no linealidad del movimiento robótico podría motivar, a velocidades altas, una situación de caos en los robots que funcionan con piezoelectricidad. Otra limitación es que no pueden funcionar simultáneamente dos bucles de control cerrados. Ello se debe principalmente a la navegación basada en el AEM («modelado de entornos mediante acciones») que se emplea y que depende del modo de funcionamiento. Teniendo presentes todas esas cuestiones, el proyecto MICRON adoptó un planteamiento de dos fases para lograr un control de posición fiable. Éste consiste en que un driver funcione en bucle abierto para equilibrar las no linealidades y las diferencias que existen entre robots distintos. En un nivel más alto hay un controlador en bucle cerrado basado en un driver casi linealizado que compensa la desviación restante. Para más información, visite: http://wwwipr.ira.uka.de/~micron/index.html(se abrirá en una nueva ventana)