

Los humanoides podrían dominar pronto el ensamblaje de aviones
El ensamblaje final durante la fabricación de aviones a gran escala es uno de los sectores menos automatizados de la industria debido a las dificultades relacionadas con el espacio de trabajo. El espacio, tanto dentro como fuera del fuselaje, es limitado y los obstáculos son numerosos. Además, no se puede prescindir de las manos y mentes de las personas en las tareas de valor añadido, lo que requiere que humanos y robots se desplacen al unísono por este espacio reducido. Todo ello añade barreras técnicas y de seguridad a la automatización del proceso de ensamblaje final. El objetivo del proyecto financiado con fondos europeos COMANOID(se abrirá en una nueva ventana) era desarrollar un robot de demostración capaz de ofrecer una accesibilidad precisa en el espacio de trabajo del ensamblaje final, una característica de la que esta industria carece sobremanera.
Robots bípedos más seguros que pueden «sentir» su camino
La clave del éxito residió en la transmisión de capacidades similares a las humanas para detectar con precisión el entorno y realizar ajustes adecuados y precisos. En primer lugar, el equipo dotó a los robots de la capacidad de explotar múltiples puntos de contacto con los objetos del espacio de trabajo en aras de lograr la locomoción o la manipulación, un concepto conocido como planificación y control multicontacto. Según Abderrahmane Kheddar, coordinador del proyecto, esto se parece «exactamente a lo que hacemos las personas cuando nos apoyamos en las manos o las rodillas para acceder a un espacio estrecho, mantener el equilibrio o aumentar la fuerza que ejercemos en una dirección concreta». Después, los investigadores se aseguraron de que la información relativa a la posición del robot y la transducción de fuerza fueran precisas. Una cámara integrada y un sistema de detección de fuerza facilitaron la localización y mapeo simultáneos (SLAM, por sus siglas en inglés) junto con un avanzado servomotor visuo-háptico. Finalmente, COMANOID logró aumentar la fuerza motriz de los robots humanoides mediante la utilización de un contacto adicional para crear cadenas cinemáticas cerradas. Los robots convencionales dependen de las denominadas «cadenas cinemáticas abiertas», cadenas de cuerpos rígidos o eslabones conectados por articulaciones, tal como sucede al agitar los brazos. No obstante, las personas emplean a menudo las cadenas cinemáticas cerradas para aumentar la fuerza aplicada y realizar trabajos difíciles. Por ejemplo, para abrir una puerta que está atascada, una persona coloca una mano en la manija de la puerta y la otra en algún lugar de una pared cercana, básicamente «cerrando» la cadena. Tal como explica Kheddar: «La mano en la pared limitará el movimiento del torso para tirar de la puerta con una fuerza mucho mayor». Kheddar y su equipo han conferido esta habilidad a sus robots humanoides.
Hito de la robótica y próximos pasos
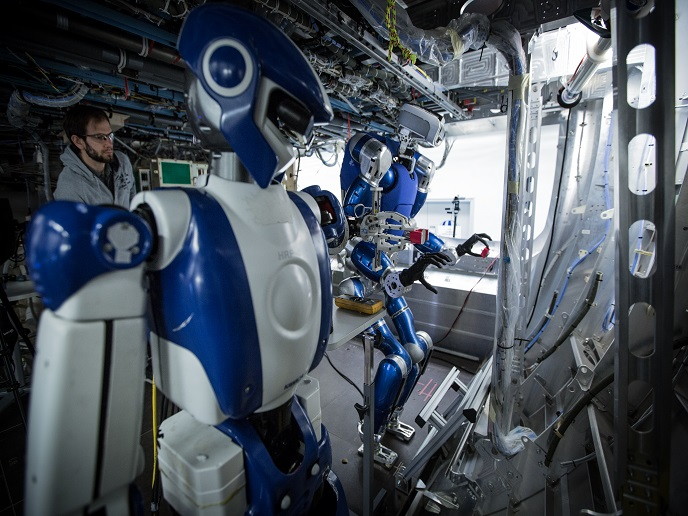
El 21 de febrero de 2019, dos robots humanoides accedieron, por primera vez en la historia, a la planta de fabricación de aviones civiles de Airbus en Saint-Nazaire (Francia), demostrando satisfactoriamente las tecnologías de COMANOID. El trascendental evento fue presenciado por representantes clave de Airbus, entre los que se encontraban el director de la fábrica, los responsables de la toma de decisiones y los ingenieros de automatización, además de representantes del consorcio COMANOID y de la Comisión Europea. Los socios de COMANOID están en contacto con empresas europeas y japonesas usuarias y proveedoras con vistas a la producción comercial. Entretanto, algunas de las tecnologías clave para el control de movimiento basado en la retroalimentación visual y táctil están ya en el mercado. Aunque los robots humanoides aún tienen que madurar y evolucionar, pronto se podrá ver la tecnología SLAM en nuestros iPhones e iPads. Kheddar concluye: «La idea de la planificación y el control multicontacto humanoide pasó de la pura curiosidad teórica de investigación a una aplicación real, con implicaciones potenciales para la competitividad de la industria europea y, a la larga, para la sociedad».



