

Humanoidalne roboty mogą wkrótce zająć się produkcją samolotów
Montaż końcowy podczas masowej produkcji samolotów należy do najmniej zautomatyzowanych procesów w branży, co wynika z trudności związanych z przestrzenią roboczą. Przestrzeń wewnątrz i wokół kadłuba jest ograniczona i pełna przeszkód. Co więcej, do wykonywania zadań o wartości dodanej niezbędni są ludzie, co oznacza konieczność wspólnego poruszania się ludzi i robotów w tej ograniczonej przestrzeni. Wszystko to stwarza dodatkowe bariery techniczne i dotyczące bezpieczeństwa, utrudniające automatyzację procesu montażu końcowego. Finansowany przez UE projekt COMANOID(odnośnik otworzy się w nowym oknie) miał na celu zbudowanie demonstracyjnego robota, który będzie w stanie zapewnić dostępność i możliwość precyzyjnego poruszania się w przestrzeni roboczej, w której odbywa się montaż końcowy – co stanowi pilną potrzebę w branży.
Bezpieczniejsze roboty dwunożne, które „wyczuwają” otoczenie
Kluczem do sukcesu było nadanie robotom podobnych do ludzkich zdolności w zakresie precyzyjnego wykrywania otoczenia oraz odpowiedniego i precyzyjnego dostosowywania ruchu. W pierwszej kolejności zespół wyposażył roboty w zdolność do wykorzystywania wielu punktów styczności z przedmiotami w celu wykonywania ruchu lub manipulowania nimi – koncepcja ta nosi nazwę planowania i kontrolowania wielu punktów styczności. Jak tłumaczy koordynator projektu Abderrahmane Kheddar, „ludzie postępują dokładnie w ten sam sposób, gdy opierają się na rękach lub kolanach, aby wejść w ciasne miejsce, utrzymać równowagę lub zwiększyć siłę, którą przykładają w danym kierunku”. Następnie uczeni zadbali o dokładność informacji o położeniu robota i przenoszeniu sił. Zintegrowana kamera i system wykrywania sił umożliwiły wykonywanie jednoczesnej lokalizacji i budowy mapy otoczenia (SLAM) w 3D oraz wykorzystanie zaawansowanego serwonapędu wizualno-haptycznego. Uczestnicy projektu COMANOID zwiększyli też siłę robotów humanoidalnych, wykorzystując dodatkowy punkt styczności, by stworzyć tzw. zamknięte łańcuchy kinematyczne. Zwykłe roboty bazują na „otwartych łańcuchach kinematycznych”, czyli takich łańcuchach sztywnych elementów połączonych przegubami, jak te które umożliwiają machanie ramieniem. W odróżnieniu od nich, ludzie często wykorzystują zamknięte łańcuchy kinematyczne, by zwiększyć przykładaną siłę i móc wykonywać trudne zadania. Przykładowo, aby otworzyć zatrzaśnięte drzwi, człowiek kładzie jedną rękę na klamce, a drugą gdzieś obok na ścianie „domykając” łańcuch. Jak wyjaśnia Kheddar, „ręka oparta o ścianę ogranicza ruch tułowia, umożliwiając pociągnięcie drzwi z dużo większą siłą”. Kheddar z zespołem wyposażyli w tę umiejętność swoje roboty humanoidalne.
Kamień milowy w dziedzinie robotyki i dalsze plany
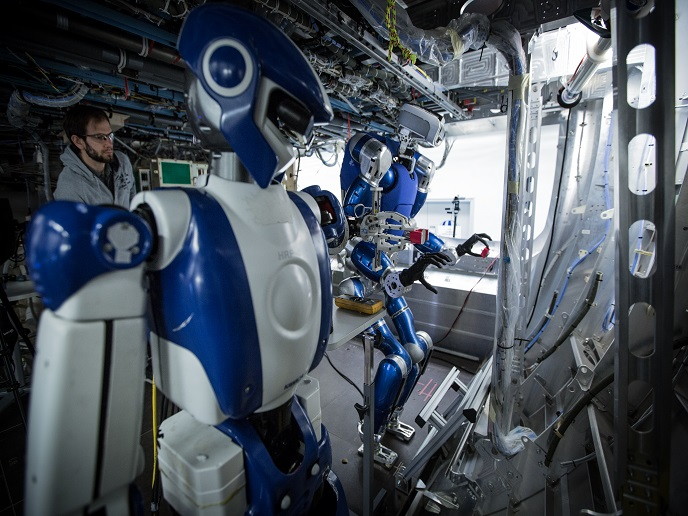
21 lutego 2019 r., po raz pierwszy w historii, dwa roboty humanoidalne rozpoczęły pracę w zakładzie produkcji samolotów cywilnych Airbus w Saint-Nazaire we Francji, umożliwiając zademonstrowanie działania technologii COMANOID. W tym ważnym wydarzeniu wzięli udział wysocy rangą przedstawiciele Airbusa, w tym kierownik fabryki, decydenci i inżynierowie automatyki, a także przedstawiciele konsorcjum COMANOID i Komisji Europejskiej. Partnerzy projektu COMANOID prowadzą rozmowy z europejskimi i japońskimi użytkownikami końcowymi i dostawcami, aby móc rozpocząć produkcję komercyjną, jednak kilka kluczowych technologii wizualnego i dotykowego sterowania ruchem, opartego na sprzężeniu zwrotnym, jest już dostępnych na rynku. Roboty humanoidalne wciąż dojrzewają i ewoluują, natomiast technologia SLAM powinna być wkrótce dostępna w iPhone’ach i iPadach. Kheddar podsumowuje: „Koncepcja planowania i kontrolowania wielu punktów styczności dla robotów humanoidalnych przeszła drogę od czysto badawczej, teoretycznej ciekawostki do faktycznego zastosowania, co może mieć istotny wpływ na konkurencyjność przemysłu europejskiego, a tym samym na dobrobyt całego społeczeństwa”.



