

Robots para limpiar zonas nucleares
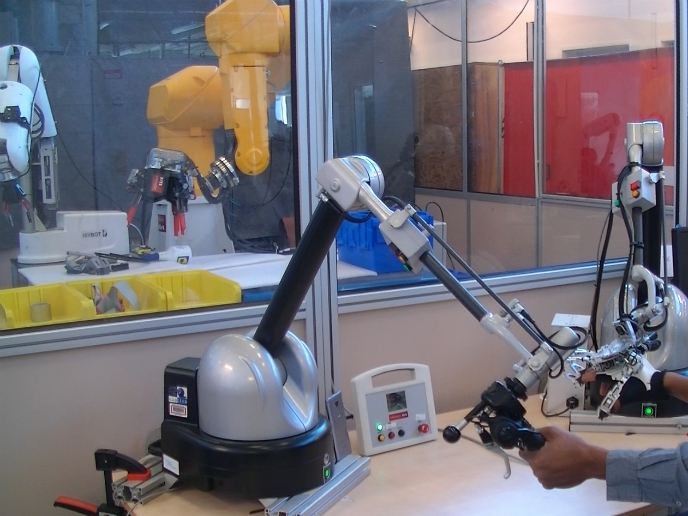
En el Reino Unido hay unos 4,9 millones de toneladas de desechos nucleares antiguos, derivados, en parte, de la producción de armas durante la Guerra Fría. El profesor Rustam Stolkin, coordinador del proyecto financiado con fondos europeos RoMaNS, explica: «La limpieza de estos residuos en el Reino Unido es el proyecto de reparación medioambiental más grande de Europa. Es un trabajo que tardará más de cien años en completarse y que costará unos 200 000 millones de euros. Los robots deben dirigir al menos un 20 % de los trabajos de desmantelamiento». El proyecto logró demostrar que, gracias a las tecnologías robóticas avanzadas, es posible realizar tareas en entornos peligrosos de manera segura y rentable. Estos sofisticados sistemas emplearon un diseño de vanguardia en visión robótica, planificación de movimientos, control e interfaces robot-humanos. También evidenciaron por primera vez que es posible aplicar estas tecnologías a los graves problemas sociales causados por los entornos nucleares. Las limitaciones de la tecnología actual En las zonas nucleares obsoletas hay un gran número de recipientes con desechos, algunos de hasta sesenta años de antigüedad. El trabajo a realizar ahora consiste en abrir estos recipientes, analizarlos y clasificar su contenido. Puesto que los desechos tendrán diferentes niveles de contaminación, deben clasificarse y separarse de modo que los menos contaminados se coloquen en recipientes para desechos con un grado menor de contaminación, evitando así un uso desmesurado del almacenamiento para artículos muy contaminados, que tiene un coste muy alto. Por extraño que parezca, el uso de robots en la industria nuclear ha sido bastante escaso, con la excepción de algunos sistemas de control remoto bastante rudimentarios. «Normalmente, el movimiento de los robots en entornos industriales peligrosos está controlado por un operador humano mediante una palanca de mando o "joystick". Sin embargo, emplear este método a la hora de procesar la enorme cantidad disponible de material contaminado sería exageradamente lento», aclara el profesor Stolkin. Los robots nucleares y la inteligencia artificial La inteligencia artificial en los sistemas robóticos podría revolucionar el método de interacción entre los trabajadores y los entornos nucleares. Los robots controlados por inteligencia artificial pueden realizar rápidamente tareas como coger objetos, algo muy complicado con el uso tradicional de «joysticks». Además de desarrollar capacidades autónomas, como coger y manipular objetos, el equipo del proyecto RoMaNS diseñó nuevas tecnologías para la teleoperación por parte de operarios humanos. Una de ellas es el uso de un brazo robótico «esclavo», resistente a la radiación, controlado por un guante (exoesqueleto háptico) que se pone el operario. El brazo esclavo imita los movimientos de la mano y los dedos humanos. El exoesqueleto háptico, a su vez, permite que el operario sienta las fuerzas experimentadas por el robot cuando este cierra la mano para coger objetos. RoMaNS trabajó hacia un concepto de control compartido, en el que los humanos y la inteligencia artificial colaboraban para controlar un robot a distancia. «El control compartido aúna la autonomía y la teleoperación. Por ejemplo, los operarios humanos pueden controlar el movimiento de un brazo robótico hacia un objeto, mientras que la inteligencia artificial orienta de forma automática la pinza en la dirección adecuada para poder sujetarlo con firmeza», describe Stolkin. El control compartido combina los exoesqueletos hápticos de la investigación en teleoperación con los algoritmos de inteligencia artificial desarrollados en los estudios sobre robótica autónoma. El exoesqueleto háptico puede dar señales físicas al operario y guiarle hacia lugares en los que la inteligencia artificial haya determinado que se producirán las mejores sujeciones o se evitarán obstáculos. A diferencia de los movimientos preprogramados y repetitivos de los robots tradicionales empleados en la fabricación industrial, la tecnología RoMaNS puede manipular una gran variedad de objetos y materiales en lugares desordenados y sin una estructura clara, aunque el robot no tenga ninguna información previa sobre estos. El sistema planifica continuamente sus acciones en tiempo real valiéndose de la información obtenida de cámaras y demás sensores. «Esta es la primera vez a nivel mundial que se ha empleado un robot autónomo controlado por inteligencia artificial en un entorno radioactivo. El proyecto RoMaNS ha demostrado que la robótica no tiene por qué limitarse al laboratorio, sino que es posible emplearla en sectores de alto riesgo en los que la seguridad es de máxima importancia», concluye Stolkin.



