Roboter für die Reinigung von Nuklearstandorten
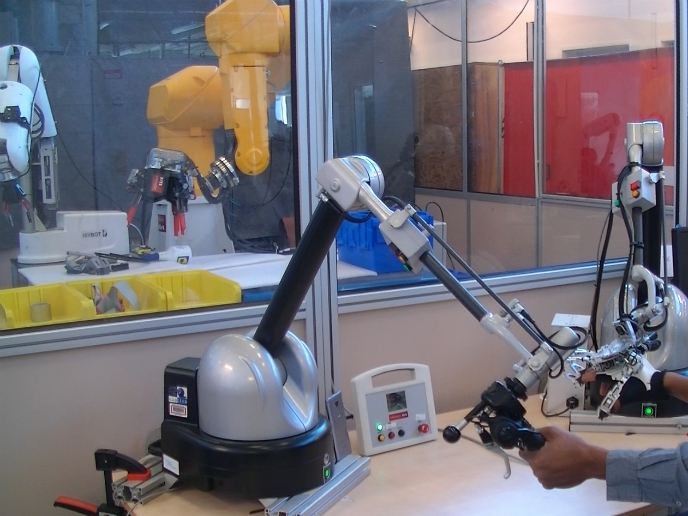
Das Vereinigte Königreich beherbergt 4,9 Mio. Tonnen radioaktiver Abfallaltlasten, die teilweise ein Nebenprodukt der Waffenherstellung während des Kalten Krieges sind. „Die Reinigung der Abfallaltlasten des Vereinigten Königreichs ist das größte Umweltsanierungsprojekt ganz Europas; es wird voraussichtlich über 100 Jahre dauern und mehr als 200 Mrd. EUR kosten. Mindestens 20 % der Stilllegungsarbeiten müssen von Robotern erbracht werden“, erklärt Professor Rustam Stolkin, der das EU-finanzierte Projekt RoMaNS koordiniert. Das Projekt demonstrierte, dass fortschrittliche Technologien im Bereich der Robotik die sichere und kosteneffektive Durchführung wichtiger Aufgaben in Gefahrenumgebungen ermöglichen können. Die ausgeklügelten Systeme übertrafen den aktuellen Stand der Technik in puncto Robotersehen, Bewegungsplanung, Steuerung und Mensch-Roboter-Schnittstellen. Sie zeigten auch erstmals, wie diese Technologien auf gesellschaftlich wichtige Probleme angewandt werden können, die sich durch nukleare Umgebungen ergeben. Warum die aktuelle Technologie ineffektiv ist Viele Abfallbehälter, die an ehemaligen Nuklearstandorten entdeckt wurden und teils 60 Jahre alt sind, müssen jetzt aufgeschnitten, untersucht und nach Inhalt sortiert werden. In Anbetracht der verschiedenen Kontaminationsniveaus muss der Abfall sortiert und getrennt werden, damit der geringfügig kontaminierte Abfall in Lagerbehältern für leicht radioaktiven Abfall untergebracht wird, anstatt überaus kostspielige Lagerbehälter für stark radioaktiven Abfall zu belegen. In der Nuklearindustrie werden mit Ausnahme weniger Fälle, in denen rudimentäre Fernsteuerungssysteme zum Einsatz kamen, erstaunlich wenige Roboter verwendet. „Typischerweise wird die Roboterbewegung in gefährlichen Industrieumgebungen durch Bedienungspersonen per Joystick gesteuert. Dieser Ansatz ist jedoch prohibitiv langsam für die Bearbeitung der riesigen Menge an kontaminiertem Material“, berichtet Prof. Stolkin. Nukleare Roboter treffen auf künstliche Intelligenz Die künstliche Intelligenz in Robotiksystemen könnte die Art und Weise verändern, in der Arbeitskräfte mit Nuklearumgebungen interagieren. Durch künstliche Intelligenz gesteuerte Roboter können Aufgaben wie das Greifen von Objekten, die mithilfe einer konventionellen Fernsteuerung per Joystick äußerst schwierig sind, schnell durchführen. Zusätzlich zur Entwicklung autonomer Fähigkeiten, mit denen der Roboter automatisch Objekte greifen und handhaben kann, entwickelte das RoMaNS-Team neue fortschrittliche Technologien für Bedienungspersonen. Dies beinhaltete den strahlungsresistenten Arbeitsarm eines Roboters, der über einen robotischen Handschuh gesteuert wird oder ein haptisches Exoskelett, das von der Bedienungsperson getragen wird. Der ferngesteuerte Arbeitsroboter ahmt die Bewegungen der menschlichen Hand und Finger nach. Durch das haptische Exoskelett kann der Mensch währenddessen die Kräfte spüren, denen der Arbeitsroboter ausgesetzt ist, während seine Finger Objekte umschließen. RoMaNS arbeitete an einem gemeinsam Steuerungskonzept, bei dem Mensch und künstliche Intelligenz gemeinsam an der Fernsteuerung eines Roboters arbeiten. „Die gemeinsame Steuerung vereint Autonomie und Fernsteuerung. Bedienungspersonen können beispielsweise steuern, wie sich ein Roboterarm auf ein Objekt zubewegt, während der Greifer durch künstliche Intelligenz automatisch in der richtigen Richtung ausgerichtet wird, um das Objekt gut greifen zu können“, betont Prof. Stolkin. Die gemeinsame Steuerung vereint das haptische Exoskelett aus der Fernsteuerungsforschung mit den KI-Algorithmen, die in der Forschung an autonomer Robotik entwickelt wurden. Das haptische Exoskelett kann dem Menschen Aufschluss über die angewandten Kräfte geben, ihn in Richtungen leiten, die nach Ansicht der KI-Algorithmen zum Beispiel in einem stabilen Griff resultieren oder Kollisionen mit Hindernissen verhindern. Im Gegensatz zu konventionellen Robotern, die repetitive vorprogrammierte Bewegungen in der Fertigungsindustrie durchführen, kann die RoMaNS-Technologie eine Vielzahl von Objekten und Materialien an unstrukturierten und unübersichtlichen Schauplätzen handhaben, die der Roboter möglicherweise noch nicht kennt. Das System muss seine Handlungen kontinuierlich in Echtzeit planen, indem Informationen von Kameras und anderen Sensoren kombiniert werden. „Das ist weltweit das erste Mal, dass ein autonomer, durch künstliche Intelligenz gesteuerter Roboter in einer radioaktiven Umgebung eingesetzt worden ist. Die Errungenschaft von RoMaNS zeigt, wie fortschrittliche Robotik die Grenzen des Labors verlassen und in einer extrem risikoaversen und sicherheitskritischen Industrie eingesetzt werden kann“, so das Fazit von Prof. Stolkin.