Selbstorganisierte Roboter arbeiten zusammen
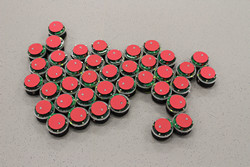
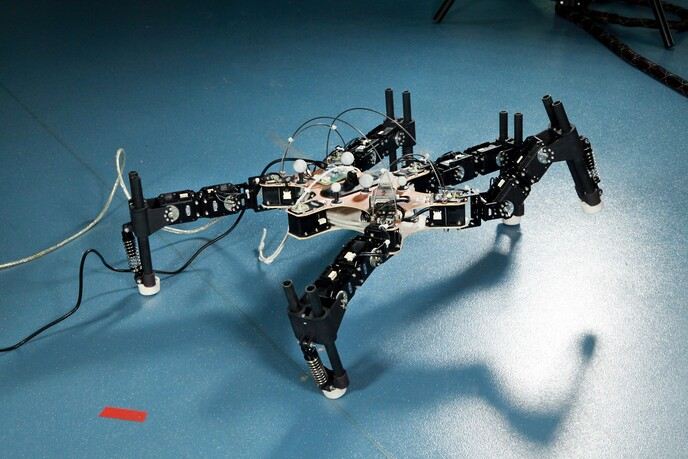
Mit Hilfe der Selbstorganisation von diskreten und autonomen Einheiten konnten gemeinsam handelnde modulare Roboter gebaut werden. Die Fähigkeiten derartiger Systeme sind jedoch vor allem aufgrund der Mängel in den derzeitigen Hardwareumsetzungen eher unzureichend erforscht. Das EU-finanzierte Projekt "Autonomous evolution of robotic organisms" (EVOLVINGROBOT) widmete sich dem Thema, wie komplexe Muster oder Strukturen in Systemen aus zahlreichen interagierenden Robotereinheiten entstehen können. Die Forscher entwickelten ein neuartiges selbstorganisiertes System aus makroskopischen Bausteinen, die in einem bewegten Medium schweben. Seine Dynamik gestattet es den Blöcken, sich physikalisch aneinander zu binden und voneinander zu lösen. Wenn diese Systeme eine große Anzahl von Blöcken umfassen, könnten solche Systeme verwendet werden, um die Entstehung, Reproduktion und Entwicklung von lebensähnlichen Organismen zu studieren. Dieser Durchbruch, durch den Roboter auf eine noch nie zuvor erreichte Art und Weise gemeinsam handeln können, könnte einen Paradigmenwechsel in der Robotik einläuten. Anstelle immer kompliziertere Roboter zu bauen, schlug das Projekt vor, dass schon extrem einfache Mechanismen eine Reihe potenzieller Fähigkeiten ermöglichen können. Der Prozess wurde lediglich durch die Bausteine und lokale Interaktionen, ohne jeglichen Plan oder Zentralbefehl geregelt. So konnte das System zu einer Population von Organismen werden, die an ihre Umgebung angepasst ist. EVOLVING ROBOT gelang die Ausbildung von Miniaturrobotern, die auf der Basis sehr simpler Vorprogrammierungen autonom handeln, um eine Anzahl gemeinsamer Aufgaben zu erfüllen. Zu diesen Aufgaben zählte das Versammeln an einem einzigen Ort, die Aufteilung in verschiedene Untergruppen, der gemeinsame Transport von Gegenständen und die Reinigung einer Fläche. Die Wissenschaftler stellten fest, dass bei keiner von diesen eine Kommunikation der Roboter untereinander erforderlich war. Außerdem war es bei einigen Aufgaben nicht nötig, dass sie einen Speicher haben oder überhaupt in der Lage sind, etwas zu berechnen. Überdies entwickelt das Projekt eine Serie von Prototypeinheiten, die Energie aus der Umwelt gewinnen und steuern können, wann und wohin sich sich bewegen. Außerdem wurde ein sich selbst zusammenfaltender modularer Roboter entwickelt, der in der Lage ist, sich zwischen zwei- und dreidimensionalen Konfigurationen umzuwandeln. Die Projektergebnisse werden in bislang noch nie erreichtem Ausmaß den Weg zur Umsetzung massiv verteilter Robotiksysteme ebnen, die mit konventioneller Sensorik und herkömmlichen Ansätzen der Informationsverarbeitung nicht zu erreichen sind.