

El reino animal como fuente de inspiración para ayudar a los robots a recuperarse
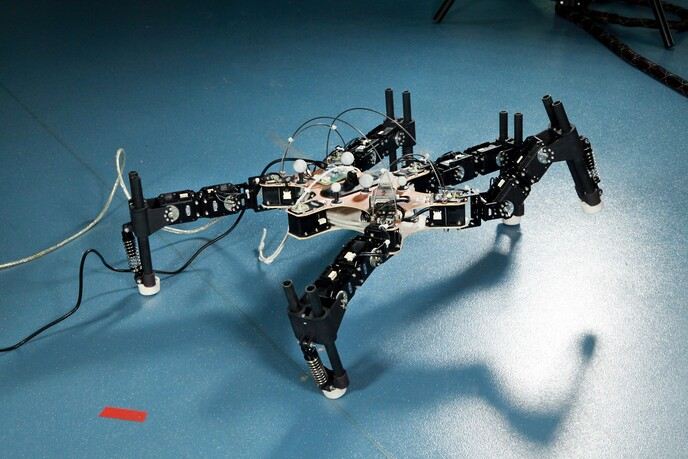
Incluso tras más de cincuenta años de investigación, la mayoría de los robots son más frágiles que los animales más pequeños y sencillos; es decir, los robots pueden dejar de funcionar fácilmente si se encuentran en condiciones difíciles o si sufren alguna caída inesperada. Si queremos que estas máquinas estén más integradas en la sociedad humana y sean útiles en situaciones de emergencia, no pueden ser tan frágiles. Aquí es donde entra en juego el proyecto ResiBots(se abrirá en una nueva ventana) (Robots with animal-like resilience). «El objetivo de nuestro proyecto era desarrollar nuevos algoritmos para lograr que los robots pudieran recuperarse de forma rápida y autónoma, de modo que no tuviesen que predecir cualquier situación peligrosa posible», comenta Jean-Baptiste Mouret, investigador principal del proyecto. «Esto es muy importante cuando se producen daños mecánicos difíciles de diagnosticar con los sensores de abordo. Nuestra filosofía consiste en desarrollar robots que puedan “improvisar” cuando tengan que realizar una misión difícil».
Una nueva perspectiva
Este concepto es totalmente contrario al de la tendencia actual de tolerancia a los fallos, que proviene de sistemas en los que la seguridad era esencial, como los empleados en vehículos espaciales o centrales nucleares. Además no es adecuado para robots autónomos de bajo coste ya que se basa en procedimientos de diagnóstico, que no solo requieren costosos sensores propioceptivos y planes de contingencia, sino que no son capaces de abarcar todas las situaciones posibles con las que se puede encontrar un robot autónomo al trabajar solo. «En conjunto, la idea principal consiste en aprovechar una simulación del robot “intacto” a fin de acelerar la adaptación para un robot con una avería desconocida», explica Mouret. Los algoritmos desarrollados por Mouret y su equipo evitan este enfoque desfasado, ya que están diseñados específicamente para adaptar la eficiencia de datos a la robótica. «Ahora es habitual ver a robots aprender a caminar en cuestión de minutos, algo que antes podía tardar horas o incluso días —agrega Mouret—. Estos son los robots con los que soñaba cuando era niño».
Del diagnóstico al refuerzo
Algo importante para el proyecto es que este primer resultado emplea el «aprendizaje episódico», lo que significa que cada prueba comienza exactamente en la misma posición. Un algoritmo más reciente permite que el robot aprenda de manera independiente, sin restablecer el sistema y teniendo en cuenta su entorno. «No tiene sentido que el robot intente marchar hacia delante si sabemos que hay un obstáculo en esa dirección», señala Mouret. Gracias a los avances recientes en el aprendizaje profundo, las máquinas ahora pueden comprender su entorno mejor que sus predecesores. Mouret comenta: «Sin embargo, si queremos que los robots sean verdaderamente capaces de adquirir nuevas habilidades o aprender a realizar nuevas tareas, necesitarán algoritmos de refuerzo y no solo de percepción. Para lograrlo, deben hacer un uso más eficiente de los datos antes de poder usarlos en situaciones reales alejadas de los laboratorios de desarrollo». Mouret es optimista y confía que esto se pueda lograr en los próximos quince años.
Una mirada al futuro
Mouret y su equipo planean seguir con su investigación incluso más allá de abril de 2020, fecha oficial de finalización del proyecto. «En la actualidad trabajamos para introducir el aprendizaje eficiente en datos a la robótica humanoide. Los robots humanoides constituyen una nueva frontera porque combinan al mismo tiempo todos los desafíos de la robótica», afirma Mouret. Hoy día no existe ningún robot humanoide capaz de usar el aprendizaje eficiente en datos para adaptarse a los cambios en su entorno, pero Mouret y su equipo quieren estar a la vanguardia para dar un vuelco a esta situación.



