Das Verhalten von Ameisen inspiriert auch Roboter

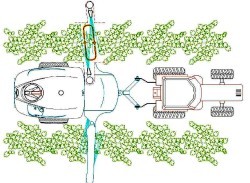
Somit hat das Verhalten der Pfadbildung der S-Bots eine Menge mit dem der Ameisen gemein. Es gibt nur einen kleinen Unterschied - die Art der Fortbewegung. Während Ameisen auf diesen Pfaden Pheromone abgeben, erstellen die S-Bots visuelle Pfade. Trotz ihrer begrenzten visuellen Fähigkeiten können die S-Bots farbige Objekte in einer Entfernung von maximal 40cm wahrnehmen. S-Bots können einen Pfad erstellen, indem sie das Objekt mit dem Zielort verbinden. Dieser Pfad dient als Orientierungshilfe für andere S-Bots oder einen Swarm-Bot. Indem sie diesem Pfad folgen, können sie ihren Weg zum Objekt und wieder zurück zum Zielort finden. Der Vorgang beginnt, sobald ein blaues Objekt, das den Zielort darstellt, von den S-Bots identifiziert wird, die dessen Umfeld per Zufallsprinzip erkunden. In der maximalen Entfernung vom Zielort halten sie an und beginnen mit der Bildung des visuellen Pfades. Der visuelle Pfad kann durch die Zufallssuche anderer S-Bots erheblich erweitert werden. Obwohl sich der visuelle Pfad in einer zufallsbedingten Richtung bildet und das Wiederauffinden des Objekts absolut nicht gesichert ist, wurde die Vorkehrung getroffen, dass unvollständige visuelle Pfad solange neu gestartet werden, bis diese vollständig sind. Im Vergleich zu konventionellen kartenähnlichen Repräsentationsansätzen beruht dieses Verfahren auf lokalen Informationen und ist einfacher in seiner Anwendung. Zu den Erkundungsstrategien wurden umfassende Versuche mit zwei probabilistischen Steuerungsparametern durchgeführt. Die Änderung dieser Parameter der Steuereinheit der S-Bots widerspiegelte eine Vielzahl von Erkundungsstrategien. Die Veränderung des Parameters zur Steuerung des Erkundungsabbruchs lieferte verschiedene Formen der gebildeten Ketten und unterschiedlich schnelle Kettenbildungsprozesse. Es konnte beobachtet werden, dass je kürzer die Zeit bis zum Erkundungsabbruch, desto schneller die Bildung von zahlreichen Ketten, und je länger die Zeit bis zum Erkundungsabbruch, desto langsamer die Bildung von weniger Ketten. Im Rahmen anderer Tests wurde die Effektivität verschiedener Strategien in Hinblick auf ihre Fähigkeit, sich den Umwelteigenschaften anzupassen, untersucht. Die zur Kettenbildung erforderliche Zeit hängt von der Komplexität der Umgebung ab, wie beispielsweise das Vorkommen von Hindernissen. Die entwickelten Steuereinheiten wurden erfolgreich bei denjenigen S-Bots angewandt, die ein gesteigertes Potenzial zur Auffindung von Objekten und zur Kettenbildung aufwiesen.