

High precision remote-controlled robotics
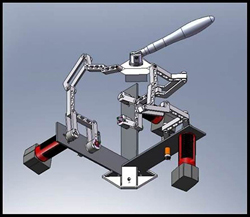
Among its many applications, haptics has had an important impact on robotics for dangerous or critically precise tasks such as those required in medicine, precision manufacturing and on the battlefield. In many of these applications, remotely controlled (teleoperated) robots are employed. The precision of the movements of these haptic systems can be improved by using parallel mechanisms that distribute loads and thus are less susceptible to effects of gravity and inertia, as well as by increasing damping of vibrations. The ‘High precision haptic device design’ (Hiphad) project has developed to explore new and alternative mechanical designs of high-precision haptic devices used in state-of-the-art applications to optimise precision. The EU-funded researchers focused on parallel mechanisms, as they are the industry standard for computer numerical control (CNC) whereby a machine uses a numerical control algorithm to automatically execute a series of operations. Following preliminary specification, prototype design and manufacture, and development of control software, project partners produced an experimental setup capable of being configured in a variety of admittance-impedance paradigms essentially defining how force is translated to motion and vice versa. They then integrated specific sensor and actuator (with a function of activating another system component) devices to the setup. Having developed the hardware and software required for the experimental setup, Hiphad researchers are now in a position to begin evaluating the system function based on the various design parameters. Continued work on this project should lead to enhancements in design of parallel mechanisms as well as development of alternative design mechanisms for haptic robotic systems used in unmanned missions requiring high precision. Among the areas for future research are system structures relevant to rehabilitation robotics.



