

Robotica di alta precisione controllata in remoto
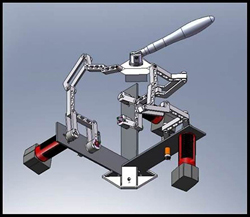
Tra le numerose applicazioni, l'aptica ha avuto un importante impatto sulla robotica per compiti pericolosi o estremamente precisi come quelli richiesti in medicina, nella produzione di precisione e sul campo di battaglia. In molte di queste applicazioni, vengono utilizzati robot controllati a distanza (teleoperati). La precisione dei movimenti di questi sistemi aptici può essere migliorata grazie all'utilizzo di meccanismi paralleli, che distribuiscono i carichi e sono quindi meno soggetti agli effetti della gravità e dell'inerzia, e mediante l'aumento dello smorzamento delle vibrazioni. Il progetto Hiphad ("High precision haptic device design") è stato sviluppato per esplorare progetti meccanici nuovi ed alternativi di dispositivi aptici di alta precisione utilizzati in applicazioni all'avanguardia per ottimizzare la precisione. I ricercatori finanziati dall'UE si sono concentrati sui meccanismi paralleli, dato che rappresentano lo standard dell'industria per il controllo numerico computerizzato (CNC), per mezzo del quale una macchina utilizza un algoritmo di controllo numerico per eseguire automaticamente una serie di operazioni. Seguendo specifiche preliminari, il progetto e la fabbricazione del prototipo e lo sviluppo del software di controllo, i partner del progetto hanno realizzato un'impostazione sperimentale in grado di essere configurata in vari paradigmi di ammissione-impedenza definendo essenzialmente come la forza viene tradotta in moto e viceversa. Quindi, hanno integrato nell'impostazione specifici dispositivi del sensore e dell'attuatore (con la funzione di attivare un altro componente del sistema). Avendo sviluppato l'hardware e il software richiesti per l'impostazione sperimentale, i ricercatori dell'Hiphad si trovano ora nella posizione in cui possono iniziare a valutare la funzione del sistema in base ai vari parametri di progettazione. Il lavoro continuo su questo progetto deve portare a miglioramenti nel design dei meccanismi paralleli e allo sviluppo di meccanismi di progettazione alternativi per sistemi robotici aptici utilizzati in missioni senza la presenza umana che richiedono un'elevata precisione. Tra le aree per la ricerca futura figurano strutture di sistema relative alla robotica di riabilitazione.



