

Hochpräzise ferngesteuerte Robotertechnik
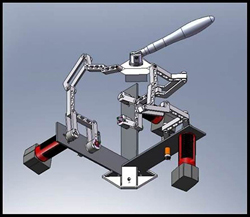
Unter den vielen Anwendungen hat die Haptik einen wichtigen Einfluss auf die Robotik für gefährliche oder kritisch genaue Aufgaben, wie sie auf den Gebieten der Medizin, der Präzisionsfertigung und im militärischen Bereich vorkommen. Bei vielen dieser Anwendungen werden ferngesteuerte (teleoperierte) Roboter eingesetzt. Die Präzision der Bewegungen dieser haptischen Systeme können unter Einsatz paralleler Mechanismen, die Lasten verteilen und damit weniger anfällig auf die Auswirkungen der Schwerkraft und Trägheit reagieren, sowie durch verstärkte Schwingungsdämpfung verbessert werden. Das Hiphad-Projekt ("High precision haptic device design") wurde entwickelt, um neue und alternative mechanische Entwürfe und Konstruktionen hochpräziser haptischer Geräte zu erforschen, die bei den Anwendungen gemäß Stand der Technik zur Präzisionsoptimierung verwendet werden. Die EU-finanzierten Forscher konzentrierten sich auf parallele Mechanismen, wie sie Industriestandard zur computergestützten numerischen Steuerung (Computer Numerical Control, CNC) sind. Dabei wird in einer Maschine ein numerischer Steuerungsalgorithmus genutzt, um eine Reihe von Operationen automatisch auszuführen. Die Projektpartner produzierten nach vorläufiger Spezifikation, Prototyperstellung und der Herstellung und Entwicklung von Steuerungssoftware einen Versuchsaufbau, der gemäß einer Vielzahl von Admittanz-Impedanz-Paradigmen konfiguriert werden kann, um im Wesentlichen festzulegen, wie Kraft in Bewegung und umgekehrt umgewandelt wird. Sie bauten dann spezielle Sensoren und Aktoren (mit einer Funktion zur Aktivierung einer anderen Systemkomponente) in den Versuchsaufbau ein. Die Hiphad-Forscher befinden sich nun nach der Entwicklung der für den Versuchsaufbau erforderlichen Hard- und Software in der Lage, auf Grundlage der verschiedenen Designparameter mit der Auswertung der Systemfunktion zu beginnen. Die Fortsetzung der Arbeit an diesem Projekt wird zu Verbesserungen in Entwurf und Konstruktion paralleler Mechanismen sowie der Entwicklung alternativer Designmechanismen für haptische Robotersysteme führen, die für unbemannten Missionen, die eine hohe Präzision erfordern, im Einsatz sind. Bereiche zukünftiger Forschung sind für die Rehabilitationsrobotik relevante Systemstrukturen.



