Unterwasserrobot spürt alternative Wasserressourcen auf

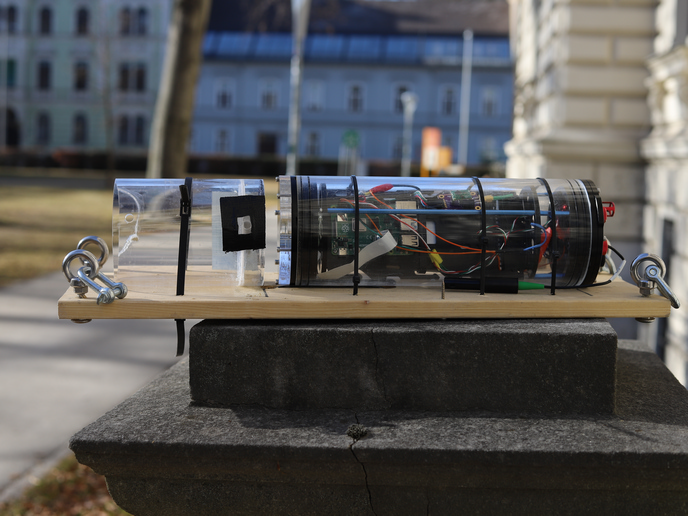
In vielen Industrieländern wird Wasser oftmals als grenzenlos zur Verfügung stehendes Naturgut betrachtet. Übermäßiger Ge- und Missbrauch haben jedoch weltweit zu einer zunehmenden Knappheit an sauberen Süßwasservorräten geführt. Wasserwirtschaftliche Maßnahmen könnten von der Nutzung alternativer Wasserressourcen profitieren. Zu diesen gehören die sogenannten submarinen Karstquellen, die Entsalzung des Meerwassers und die Wasserwiederverwendung. Submarine Karstquellen entstehen bei der Entwässerung sehr großer Gebiete mit daraus resultierender Ansammlung enormer Wassermengen. Grundwasser aus Stürmen, schmelzendem Schnee oder durch jahreszeitbedingte Regenfälle wird dabei innerhalb weniger Tage rasant an die Oberfläche transportiert. Zwar handelt es sich beim hervortretenden Wasser im Regelfall nicht um Trinkwasser, doch könnte die Nutzung der Karstgrundwasserleiter als alternative Wasserquelle dienen, die der durch Naturereignisse und Menschen bedingten Wasserknappheit entgegenwirken kann. Ein europäisches Konsortium setzte es sich zur Aufgabe, wasserwirtschaftliche Initiativen zu unterstützen, indem es küstennahe Karstgrundwasserleiter in die Gleichung der Wassergewinnung (des Einzugs) im Mittelmeerraum mit einbezog. Mit EU-Fördermitteln für das Projekt "Mediterranean development of innovative technologies for integrated water management" (Meditate) konnte ein unbemanntes Unterwasserfahrzeug (AUV, Autonomous Underwater Vehicle) zur Erforschung der unterseeischen Quellen entwickelt werden. Bei dem AUV handelte es sich um ein Robotersystem, das vorher festgelegten Wegen mit minimaler Fehlerquote folgen konnte. Zusätzlich wurden noch Sensoren für die genaue Messung der Leitfähigkeit (die im Zusammenhang mit dem Salzgehalt steht), der Tiefe und der Temperatur sowie ein Sonar-Instrument zur Untersuchung großer unterseeischer Gebiete eingebaut. Hydrogeologen konnten die Missionen über ein besonders auf sie zugeschnittenes Mensch-Maschine-Interface steuern und kontrollieren. Über die Erfassung von zwei- und dreidimensionalen Daten und über Analysesoftware für die Missionen konnten schnell und einfach Informationen von zuvor gewonnene Proben bezogen werden. Experimentelle Missionen ermöglichten die Optimierung bestimmter Tauchstrategien und der Steuerung, sowie den Vergleich mit handelsüblichen Technologien. Der Erfolg der Haupterrungenschaft des Meditate-Projekts, das AUV, sollte sich bedeutend auf das zunehmend kritische Problem der Bewirtschaftung der Wasserressourcen im Mittelmeerraum und darüber hinaus auswirken.