Humanoide könnten schon bald die Flugzeugmontage erobern
Die Endmontage bei der Herstellung von Großflugzeugen gehört aufgrund des schwierigen Arbeitsumfeldes zu den am wenigsten automatisierten Sektoren der Branche. Innerhalb des Rumpfes und um ihn herum ist der Platz begrenzt und von zahlreichen Hindernissen geprägt. Darüber hinaus kann bei wertschöpfenden Aufgaben, die voraussetzen, dass sich Menschen und Roboter gemeinsam auf diesem engen Raum bewegen, nicht auf menschliche Hände sowie den menschlichen Verstand verzichtet werden. All dies führt zu Hindernissen in Sachen Technik und Sicherheit, die der Automatisierung des Endmontageprozesses im Wege stehen. Das EU-finanzierte Projekt COMANOID(öffnet in neuem Fenster) wollte einen Roboter als Vorführmodell bauen, auf den im Arbeitsbereich für die Endmontage präzise zugegriffen werden kann – ein Merkmal, das dieser Branche dringend fehlt.
Sicherere zweibeinige Roboter, die ihren Weg „fühlen“ können
Der Schlüssel zum Erfolg war die Vermittlung menschlichen Fähigkeiten nachempfundener Funktionalitäten zur genauen Erfassung der Umgebung und zur Durchführung bedarfsgerechter und präziser Anpassungen. Zunächst verlieh das Team den Robotern die Fähigkeit, mehrere Kontaktpunkte zu Objekten innerhalb des Arbeitsbereiches für Fortbewegung und Manipulationsbewegungen zu nutzen, ein Konzept, das als Planung von Kontakten für Multi-Kontakt-Bewegungen bezeichnet wird. Laut Projektkoordinator Abderrahmane Kheddar entspricht dies „genau dem, was Menschen tun, wenn wir uns auf die Hand oder die Knie stützen, um in einen engen Raum zu gelangen, das Gleichgewicht zu halten oder die Kraft zu erhöhen, die wir in eine bestimmte Richtung ausüben.“ Als Nächstes stellte das Team sicher, dass die Positionsdaten und die Kraftübertragung der Roboter präzise waren. Ein integriertes Kamera- und Kraftmesssystem ermöglichte den Einsatz von 3D-Dense-SLAM-Technologie (Simultaneous Localisation and Mapping) zusammen mit fortgeschrittenem Visual und Haptic Servoing. Schließlich steigerte COMANOID erfolgreich die Betriebskraft der humanoiden Roboter durch zusätzliche Kontaktpunkte, um so geschlossene kinematische Ketten zu erzeugen. Gewöhnliche Roboter sind auf sogenannte „offene kinematische Ketten“ angewiesen, d. h. Ketten aus starren Körpern oder Gliedern, die durch Gelenke verbunden sind, so ähnlich wie, wenn wir unseren Arm bewegen. Geschlossene kinematische Ketten werden jedoch häufig zur Erhöhung der aufgebrachten Kraft oder zur Durchführung schwieriger Aufgaben verwendet. Um zum Beispiel eine klemmende Tür zu öffnen, legt ein Mensch eine Hand auf den Türgriff und die andere an eine nahegelegene Wand – wodurch die Kette quasi „geschlossen“ wird. Wie Kheddar erklärt, „wird durch die Hand an der Wand die Bewegung des Rumpfes eingeschränkt, sodass mit einer viel höheren Kraft an der Tür gezogen werden kann.“ Kheddar und sein Team haben diese Fähigkeit auf ihre humanoiden Roboter übertragen.
Ein Meilenstein in der Robotertechnik und der Weg in die Zukunft
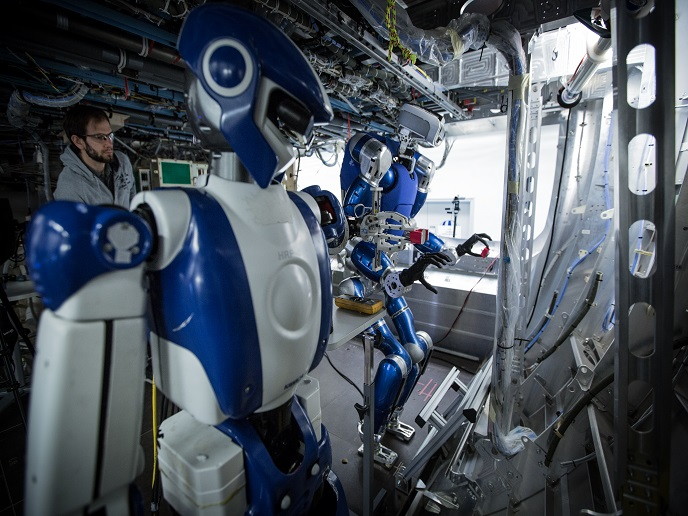
Am 21. Februar 2019 setzten zum ersten Mal in der Geschichte zwei humanoide Roboter Fuß in die Produktionsstätte für Zivilflugzeuge von Airbus im französischen Saint-Nazaire und demonstrierten erfolgreich die Technologien von COMANOID. Zeuge dieses bedeutsamen Ereignisses wurden sowohl wichtige Vertreter von Airbus, darunter der Werksleiter, Entscheidungsträger und Automatisierungsingenieure, als auch das COMANOID-Konsortium und Vertreter der Europäischen Kommission. Die COMANOID-Partner sind mit europäischen und japanischen Anwender- und Zuliefererunternehmen im Gespräch, um die kommerzielle Produktion voranzubringen. Bis dahin sind bereits einige der Schlüsseltechnologien für die visuelle und haptische, auf Feedback basierende Bewegungssteuerung auf dem Markt erhältlich. Während die humanoiden Roboter immer ausgereifter werden und sich weiterentwickeln, wird die SLAM-Technologie schon bald für iPhones und iPads verfügbar sein. Kheddar fasst zusammen: „Die Vision für die Planung von Kontakten für Multi-Kontakt-Bewegungen von Humanoiden hat sich von einer rein forschungsbezogenen theoretischen Neugierde zu einer realen Anwendung mit potenziellen Auswirkungen auf die Wettbewerbsfähigkeit der europäischen Industrie und im weiteren Sinne auf die Gesellschaft entwickelt.“