Cuando los robots tengan bigotes
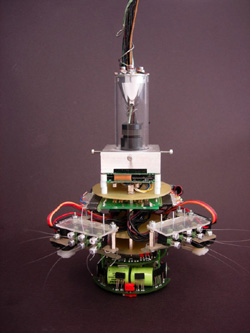
La percepción táctil que proporcionan las vibrisas a ratones y ratas es casi tan buena como la percepción que alcanzan los humanos con las yemas de los dedos. Si tenemos en cuenta los miles de receptores táctiles de las yemas de los dedos, resulta asombroso que tan sólo treinta vibrisas a cada lado de la cara de un roedor les permitan desenvolverse en entornos complejos así como en la oscuridad. Este potencial de las vibrisas como sensores del tacto versátiles cuyo funcionamiento requiere un contacto mínimo con los objetos y que es independiente de la luz existente fue la característica que llamó la atención de los socios del proyecto AMOUSE. Los ingenieros trabajaron en colaboración con biólogos y neurocientíficos en la investigación de la morfología adecuada de grupos de vibrisas artificiales sensoras instaladas en los laterales de un robot móvil. Se dotó al «ratón artificial» de doce vibrisas artificiales y una cámara que haría las funciones de modelo biomimético para estudiar la manera en la que los roedores procesan información perteneciente al sentido del tacto. Además, investigaron la interacción entre distintos sistemas sensoriales como el visual y el somatosensorial. Concretamente, se abordaron cuestiones relacionadas con la importancia que ejerce la morfología del conjunto de vibrisas en la capacidad del «ratón artificial» para moverse en un ambiente experimental sin topar con obstáculos. Evitar choques tiene una importancia primordial para los robots móviles. Anteriormente, esto se había logrado mediante sensores ópticos que dependían de la iluminación del entorno y que además requerían un procesamiento de imagenes de gran complejidad computacional. El reto al que se enfrentaron los socios del proyecto en el Instituto Max-Planck de Investigación Psicológica fue la realización de los cálculos de distancias y el reconocimiento de la forma de los objetos que se encuentra una sonda mecánica. El ángulo de desviación o las indicaciones de velocidad de las vibrisas artificiales produjeron información básica sobre la localización del objeto y crearon la base mediante la cual identificar su forma. Medir las distancias de contacto a distintos ángulos de protracción permitió distinguir entre objetos redondos de curvas variables e incluso entre cubos y cilindros. A pesar de que la forma de los objetos de superficie no rugosa era identificada con una única vibrisa, dos o más vibrisas dispuestas a lo largo de una vertical proporcionaban mejor capacidad sensora. Lo que quizá reviste aún más importancia son las nuevas pistas ofrecidas a los científicos, puesto que podrían ayudar a comprender la forma en la que los roedores reconocen las formas mediante sus vibrisas.