Autonomous microrobots working together in nano-manipulation applications
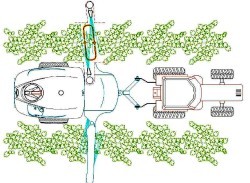
The increasing scientific and technological advancements in the domain of biotechnology and nano-technology demand for simultaneous progress of micro and nano-robotics. Several promising sensing and actuation techniques have been devised that allow detection and manipulation of micro and nano-metre scaled objects such as biological cells, neurons, nanotubes and other nanostructures. Furthermore, motion mechanisms and micro-robotic platforms have been designed for flexible robotic systems that can ensure manipulation precision. Taking micro-robotic platforms one step further, the MICRON project consortium financed by the European Union has developed a flexible nanofactory for automated assembly and manipulation tasks. This multi-robot system is based on a limited cluster of autonomous miniature robots, each equipped with onboard electronics for control and communication that cooperate within a desktop environment. During design and development of the MICRON system several control issues arose due to the minimised size of the microrobots. The most important among the miniaturisation constraints were power supply constraints, communication bandwidth limitations, limited on-board processing capabillties and the inherently limited degrees of freedom of the robot's micro-manipulator. Power autonomy was achieved by using inductive energy transmission from a wireless power supply system or a battery-based system for autonomous operation without interference from surrounding magnetic fields. Custom designed mixed-signal integrated circuits provide for communication between individual robots and the host computer with the use of the infrared remote protocol. For the microrobots navigation, coordination and cooperation control, appropriate signals (trapezoidal, sawtooth and triangular) are generated. These signals are amplified in cell manipulation applications to provide closed loop control for the Atomic force microscopy tool, mounted on the tip of a rotational piezoelectric actuator arm. All the driving electronics have been mounted on interconnected printed circuit boards with a total size of 12 mm x 12 mm x 10 mm, making further minimisation of the microrobots' dimension possible. In order to continue research and innovation in the field of electronic design for nanotechnology application, collaborative links are being sought with chip manufacturers, toolmakers and advanced research institutes.