Wykorzystanie robotów w przemysłowych pracach konserwacyjnych

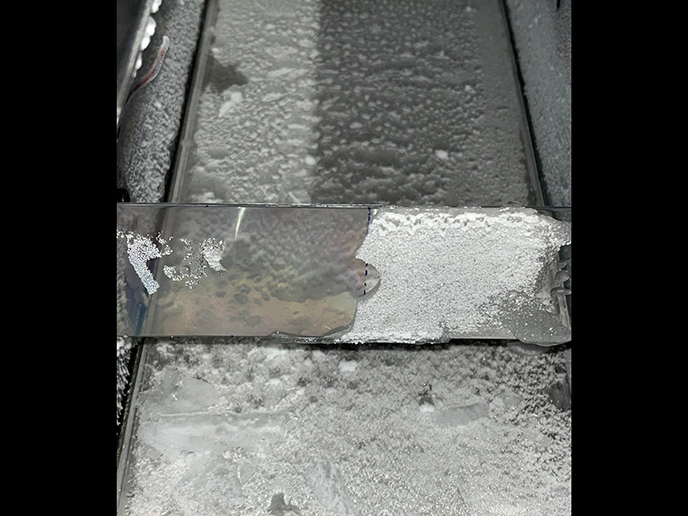
Skuteczna i efektywna konserwacja odgrywa ważną rolę we wszystkich instalacjach przemysłowych. W takim otoczeniu, charakteryzującym się zainwestowaniem ogromnych środków kapitałowych, w którym bezpieczeństwo operatora urządzeń lub inspektora może być problematyczne, rozwiązania dotyczące konserwacji pełnią jeszcze ważniejszą funkcję. Uczestnicy finansowanego ze środków UE projektu MAINBOT(odnośnik otworzy się w nowym oknie) (Mobile robots for inspection and maintenance activities in extensive industrial plants) przystosowali kołowe platformy mobilne i roboty wspinające się do autonomicznej kontroli urządzeń w bardzo dużych zakładach produkcyjnych poprzez połączenie wielu różnych technologii detekcji robotycznej. W tym celu zbudowano prototypy robotów naziemnych i wspinających się, których zadaniem jest kontrolowanie urządzeń umieszczonych w pionie lub poziomie. Partnerzy zdefiniowali sześć czynności, dla których opracowano rozwiązania. Polegają one na detekcji lub pomiarze odbijania lustrzanego, wycieku płynu będącego nośnikiem ciepła, degradacji powłoki, rozbitych luster, utraty próżni w rurach kolektora, korozji i pęknięć. Wymogi dla platform zrobotyzowanych oparto na kryteriach bezpieczeństwa i niezawodności. W projekcie MAINBOT opracowano środowiska symulacyjne oraz dwie makiety na potrzeby testów. Makiety naziemne umożliwiły ocenę skuteczności algorytmów nawigacji i manipulowania, natomiast makieta pionowa pozwoliła na ocenę metod wspinania i pozycjonowania czujników w robocie wspinającym. Ponadto platformy robotyczne dostosowano w oparciu o odpowiednie specyfikacje. Rozwinięto też szereg technologii kontroli. Prototypy przeszły pomyślnie testy w dwóch słonecznych elektrowniach termalnych. Dzięki projektowi MAINBOT sektory przemysłu wymagające dużych inwestycji kapitałowych mogą skuteczniej rozwiązywać różne problemy dotyczące konserwacji dużych instalacji. Europejski przemysł z pewnością skorzysta poprawie wydajności zakładów wytwórczych.