

Inteligentne roboty mogą poznawać tajniki recyklingu niebezpiecznego sprzętu
Elektrośmieci stanowią obecnie jeden z najszybciej rosnących strumieni odpadów w Unii Europejskiej. Co gorsza, zaledwie 40 % z nich jest poddawane recyklingowi(odnośnik otworzy się w nowym oknie). Demontaż smartfonów, komputerów i innych urządzeń elektronicznych jest skomplikowanym procesem, który często stanowi niebezpieczeństwo dla ludzi wykonujących te zadania. Jedną z przyczyn tego stanu rzeczy jest fakt, że wiele z tych urządzeń zbudowano przy pomocy zaawansowanych robotów. Nasuwa się jedno pytanie – czy podobne maszyny mogą pomóc nam w ich utylizacji? Roboty są zazwyczaj programowane do wykonywania ograniczonej liczby powtarzalnych zadań. Zespół finansowanego ze środków Unii Europejskiej projektu IMAGINE(odnośnik otworzy się w nowym oknie) (Robots Understanding Their Actions by Imagining Their Effects) opracował inteligentny system pozwalający robotom zrozumieć, w jaki sposób mogą rozłożyć na części pierwsze wariant urządzenia, którego nie napotkały do tej pory. Nawet niewielkie urządzenie może zawierać setki śrubek, których ręczne odkręcenie może być pracochłonne. „W rezultacie, gdy okazuje się, że recykling danego urządzenia będzie bardzo kosztowny, w praktyce nikt tego nie robi”, wyjaśnia koordynator projektu Justus Piater, kierownik Ośrodka Nauk Cyfrowych(odnośnik otworzy się w nowym oknie) na austriackim Uniwersytecie w Innsbrucku. Jak dodaje badacz, tego rodzaju urządzenia są często utylizowane w sposób, który może być groźny zarówno dla zdrowia, jak i dla środowiska naturalnego. Zespół czteroletniego projektu zajmował się zwiększaniem możliwości robotów poprzez poprawę zdolności adaptacyjnych, percepcji i autonomii w podejmowaniu decyzji, łącząc uczenie maszynowe z symulacjami fizycznymi dotyczącymi obsługi urządzeń, które roboty mogą napotkać w ramach realizowanych przez nie zadań. „Największym przełomem osiągniętym przez nasz zespół jest wysoce integracyjny aspekt systemu, który jest w stanie skutecznie rozmontowywać – częściowo lub całkowicie – urządzenia, których dotychczas nie obsługiwał. Takie rozwiązanie byłoby niemożliwe do zaprogramowania lub zaplanowania od podstaw ze względu na brak wymaganych informacji i danych”, twierdzi Piater.
Inteligentny system
Jedną z najważniejszych nowinek technicznych jest możliwość uruchomienia przez system symulacji fizycznej, aby ocenić przydatność pewnych działań. „Możliwość ocenienia tego aspektu z wyprzedzeniem pozwala na gromadzenie doświadczeń i statystyk opisujących użyteczność działań, co z czasem pozwala na podejmowanie lepszych i trafniejszych decyzji. Nasz system uczy się na tej podstawie”. Symulacje fizyczne pozwalają na tworzenie i wizualizację obiektów, a także ich interakcji z otoczeniem. Obrazy urządzenia uzyskane z użyciem kamery są analizowane, by ustalić możliwe działania, takie jak odkręcanie, podważanie, odsuwanie, obracanie, potrząsanie i tak dalej. Zespół projektu IMAGINE zajął się zwiększaniem zdolności percepcyjnych robotów, takich jak wykrywanie i rozpoznawanie obiektów, a także szacowanie położenia i orientacji części. Opracowano również nowe systemy wykrywania łbów śrub, detekcji możliwości działania oraz czujniki pozwalające na ustalanie miejsc, w których znajdują się przewody i kable. „Opracowaliśmy wiele nowych funkcji, a także nowatorskie rozwiązania w zakresie możliwości percepcyjnych, w tym analizy obrazów”, zauważa Piater.
Innowacyjne planowanie
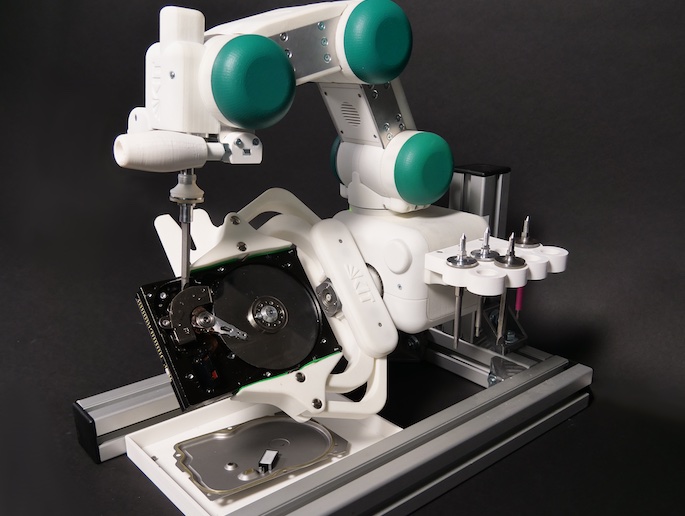
Badacz szczegółowo opisuje także kwestie planowania: „W ramach prac opracowaliśmy specjalny system planowania, którego zadaniem jest podejmowanie decyzji na temat kolejnych działań. Osiąga to, wybierając możliwości, z których może skorzystać, a także spoglądając w przyszłość i opracowując możliwie dalekosiężne plany”. Plany te mogą opierać się zarówno na symulacjach, jak i na rzeczywistych interakcjach z obiektem. Algorytmy planujące są formułowane matematycznie, co pomaga w tworzeniu kompleksowych planów. W niektórych sytuacjach cały proces może przebiegać jednak bez żadnego planu. „Jeśli maszyna nie może osiągnąć celu, nie ma możliwości zweryfikowania, czy jakiekolwiek działanie będzie przydatne. Algorytmy planujące opracowane w ramach projektu IMAGINE wiedzą, czy i w jaki sposób mogą osiągnąć postępy, nawet jeśli nie są w stanie stworzyć pełnego planu – zupełnie jak ludzie”, zauważa badacz. Z myślą o demontażu małych urządzeń elektronicznych zaprojektowano zaawansowany wielofunkcyjny chwytak robotyczny z wbudowanym zmieniaczem narzędzi. Prototyp rozwiązania został przeszkolony w zakresie demontażu dysków twardych, może także obsługiwać niektóre typy procesorów graficznych. „Pozwoliliśmy robotowi wielokrotnie przejść przez cały proces, a następnie przeanalizowaliśmy stan przed i po. Innymi słowy, pozwoliliśmy robotowi uczyć się na podstawie własnych doświadczeń”, dodaje Piater.



